Свойство синхронной машины менять реактивную мощность и ее знак оказывается очень интересным в энергетическом отношении: она может использоваться и как хорошо управляемый специальный компенсатор реактивной мощности при Мс = 0, и при надлежащем выборе как элемент электропривода, выполняющий кроме главной функции (движения механизма) еще одну функцию – рационализацию режима питающей сети.
Динамическая модель
Мы уже отметили, что при малых значениях
угла q М![]() сэмq. Из этого
следует, что по главным динамическим свойствам синхронная машина подобна
упругой механической системе. Действительно, поскольку угол q есть угол между осью поля, вращающегося со скоростью
сэмq. Из этого
следует, что по главным динамическим свойствам синхронная машина подобна
упругой механической системе. Действительно, поскольку угол q есть угол между осью поля, вращающегося со скоростью ![]() ,
и осью ротора, имеющего скорость
,
и осью ротора, имеющего скорость ![]() , то
продифференцировав М
, то
продифференцировав М![]() сэмq, получим:
сэмq, получим:
![]() ,
(4.27)
,
(4.27)
где сэм – коэффициент,
характеризующий жесткость «магнитной пружины», который аналогичен жесткости
механической связи (механической пружине). Вследствие этого можно сделать вывод,
что синхронная машина очень склонна к качаниям, и это ее свойство, очевидно,
неблагоприятно. Именно поэтому большие синхронные машины оборудуются специальными
демпферными устройствами, похожими на беличью клетку асинхронного двигателя и
обеспечивающими асинхронную составляющую
момента: ![]() .
.
Кстати, эти же устройства используются и для асинхронного пуска синхронного двигателя при питании от сети, операции непростой и неприятной. В небольших двигателях применяются другие средства для избавления от чрезмерной склонности к колебаниям.
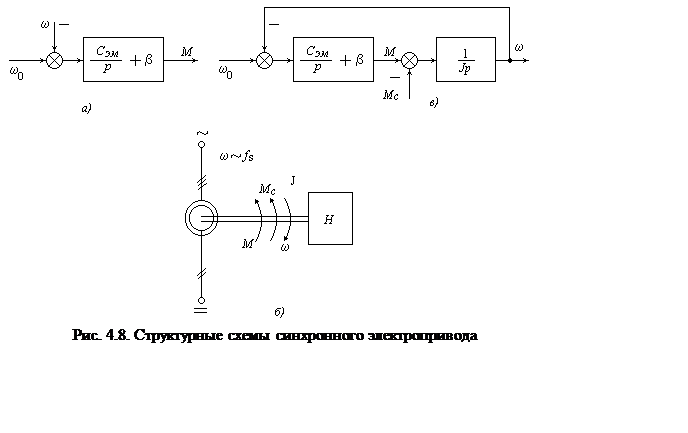
С учетом изложенного, синхронный
двигатель может быть в первом приближении представлен динамическим звеном,
показанным на рис. 4.8, а. Простейшему электроприводу с синхронным двигателем
(рис. 4.8, 6) будет тогда соответствовать структурная схема на рис. 4.8, в.
Как уже отмечалось, электроприводы с синхронными машинами получили в последние 20 – 30 лет интенсивное развитие. Идея управлять вектором напряжения, перемещая его на дозированные, зависящие от числа поступивших команд углы, привела к созданию дискретного электропривода с шаговыми двигателями – увлекательному новому научному направлению, получившему особенно яркое развитие в последнее время. Появилась много двигателей-модулей (планарных, линейных, поворотных, комбинированных) и преобразователей, формирующих токи заданной формы, разработаны совершенные алгоритмы управления, обеспечивающие сложное и точное движение. Определилась и область использования: гибкие производственные системы в различных технологических сферах – от микроэлектроники до линий лазерной обработки деталей, автоматизированной безлюдной сборки сложных изделий и т.п.
Другой вариант этой идеи – формирование управляющих воздействий на двигатель (т.е. скорости поля) в функции положения ротора привел к созданию так называемых вентильных двигателей, т.е. комбинаций синхронного двигателя с электронным коммутатором и датчиком положения ротора.
Вентильные двигатели как бы дополнили классификацию электрических машин: по питанию это машины постоянного тока, по принципу действия – синхронные и т.п. Пока же вентильные двигатели, в которых электромеханическая и электронная части (коммутатор – электронный коллектор) органично связаны, послужили поводом для образования новой ветви в электромеханике, которую ее создатели назвали электромеханотроникой.
Не только специальные, но и обычные, традиционно неуправляемые синхронные двигатели все чаще становятся объектами регулирования: создана теория таких систем, разработаны технические решения. Эта тенденция вполне устойчива и, несомненно, приведет к взаимному обогащению теории электропривода и технологической сферы, в которой используется электропривод.
4. ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРОПРИВОДЕ С МАШИНАМИ ПЕРЕМЕННОГО ТОКА.. 39
4.1. Асинхронная машина. Простейшие модели. 39
4.2. Основные характеристики асинхронной машины.. 42
4.3. Параметры и режимы асинхронного электропривода. 46
4.4. Основные характеристики электропривода с синхронным двигателем. 48
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.