Прежде чем записать формульные выражения для Мк и sk, а также количественную зависимость M = f(s), получим простое и очень важное энергетическое соотношение для асинхронного двигателя.
Поскольку поле в воздушном зазоре вращается со скоростью w0 , а электромагнитный момент имеет некоторое значение М, то электромагнитная мощность при этом выразится как
![]() (4.12)
(4.12)
Мощность,
потребляемая из сети (Р1), если принять самое грубое
приближение
(см. рис. 4.2, а), будет равна электромагнитной; если учесть Rs![]() 0 и Xss
0 и Xss![]() 0, она будет несколько больше, но часто все равно можно полагать, что P1
0, она будет несколько больше, но часто все равно можно полагать, что P1![]() Pэм . Мощность на валу, очевидно,
при этом будет равна: P2 = Mw .
Pэм . Мощность на валу, очевидно,
при этом будет равна: P2 = Mw .
Теперь нетрудно обнаружить, что потери в роторной цепи (DР2) составят:
![]() . (4.13)
. (4.13)
Последнее соотношение очень важно, поскольку позволяет при неизменной частоте (fs) и, следовательно, w0 непосредственно оценивать энергетическую плату за отличие скорости ротора от синхронной, т.е. за регулирование скорости.
Выражение для DР2 удобно при получении формул для M = f(s), MKи sк. Действительно,
приравняв потери DР2 из формулы (4.13) их
очевидному
выражению ![]() , получим:
, получим:
![]() .
.
Затем, подставив I'r из формулы (4.9) и найдя экстремум функции M = f(s) и соответствующие ему Мк и sк, получим уравнение механической характеристики, которое получило название уточненной формулы Клосса:
![]() , (4.14)
, (4.14)
где а = Rs / R'r; 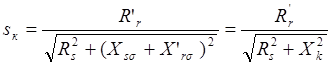 – критическое скольжение;
– критическое скольжение;
![]() - индуктивное сопротивление
короткого замыкания.
- индуктивное сопротивление
короткого замыкания.
Критический момент при этом выразится как
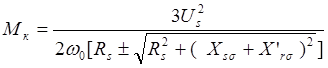 ,
(4.15)
,
(4.15)
где знак «+» относится к двигательному режиму, а «-» – к генераторному.
Часто на практике
полагают, что а = 0 если ![]() , т.е.
пренебрегают активным сопротивлением обмотки статора (
, т.е.
пренебрегают активным сопротивлением обмотки статора (![]() ).
Это обычно не приводит к существенным погрешностям при Рном > 5 кВт /4/, однако
может неоправданно ухудшить модель при малых мощностях. При а = 0 выражения
(4.14) – (4.16) становятся более простыми:
).
Это обычно не приводит к существенным погрешностям при Рном > 5 кВт /4/, однако
может неоправданно ухудшить модель при малых мощностях. При а = 0 выражения
(4.14) – (4.16) становятся более простыми:
![]() ;
(4.17)
;
(4.17)
![]() ;
(4.18)
;
(4.18)
![]() . (4.19)
. (4.19)
Выражения (4.17) – (4.19) получили название упрощенных формул Клосса.
Выражения (4.14) – (4.19), полученные при принятых ранее допущениях, вместе с выражениями (4.2), (4.9), (4.13) очень полезны, так как они дают ответы на многие практические вопросы, в частности: какие величины и как влияют на вид механической характеристики, как можно регулировать скорость, момент или ток.
Прежде чем детально рассматривать сначала теоретические, а затем и практические аспекты асинхронного электропривода как системы, сопоставим найденное упрощенное математическое описание двигателя с номинальными данными, оценим допустимые границы изменения координат при регулировании.
Для асинхронного двигателя обычно известны номинальные напряжение (Usном = Uном,) частота (fsном = f1ном), ток (Isном), выходная мощность (мощность на валу) (Рном), частота вращения (nном), КПД (hном), cosfном. Поскольку обмотка статора может быть соединена как в звезду, так и в треугольник, даются два значения линейных напряжения и тока: UномY/UномD и IsномY /Is номD. Нетрудно обнаружить, что они соответствуют одним и тем же значениям фазных величин. Для короткозамкнутых двигателей указываются обычно кратности пускового тока (lIп = Isп/Is ном) и пускового момента (lMп = Мп / Мном), а также кратность максимального момента (lMк = Mк / Mном). В каталогах приводятся типовые естественные характеристики. Для двигателей с фазным ротором дополнительно указываются ЭДС на разомкнутых кольцах заторможенного ротора (Еr ном) и номинальный ток ротора (Ir ном). В каталогах можно найти момент инерции двигателя, его массу.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.