Действительно, при ![]() , т.е. при
, т.е. при ![]() , обмотка ротора (примем ее для упрощения такой же, как
на статоре) не пересекает силовых линий
поля, и fr = 0. При неподвижном роторе (w= 0,s = l) машина
не отличается от обычного
трансформатора, т.е. fr = fs.
, обмотка ротора (примем ее для упрощения такой же, как
на статоре) не пересекает силовых линий
поля, и fr = 0. При неподвижном роторе (w= 0,s = l) машина
не отличается от обычного
трансформатора, т.е. fr = fs.
Обнаружим, вместе с
тем, что единственным источником, действующим в роторной цепи, является ЭДС (![]() ), наведенная по закону
электромагнитной индукции в обмотке ротора (по-прежнему будем рассматривать одну фазу) и равная:
), наведенная по закону
электромагнитной индукции в обмотке ротора (по-прежнему будем рассматривать одну фазу) и равная:
![]() .
(4.8)
.
(4.8)
Штрихами здесь и далее отмечены приведенные величины, учитывающие неодинаковость обмоток статора и ротора.
Учитывая, что обмотка
ротора обладает сопротивлением (![]() ) и
индуктивностью рассеяния (
) и
индуктивностью рассеяния (![]() ), получим
выражение
для тока ротора (
), получим
выражение
для тока ротора (![]() ):
):
или после простых преобразований получим:
![]()
 ,
(4.9)
,
(4.9)
где X΄r – индуктивное сопротивление рассеяния фазы ротора при частоте питающего напряжения fs.
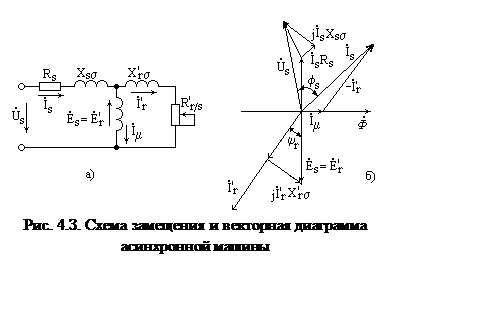
Нетрудно заметить, что мы пришли к обычной, самой распространенной схеме замещения фазы асинхронной машины (рис. 4.3, а). Схеме замещения соответствует векторная диаграмма (рис. 4.3, 6), наглядно представляющая связь между векторами всех величин в любом конкретном режиме.
Прежде чем
использовать полученное представление для определения электромагнитного момента,
характеристик и т.п., подчеркнем ограничения, соответствующие найденной модели.
Во-первых, она получена для одной фазы в предположении, что другие одинаковы и все напряжения симметричны. Нарушение любого из этих условий делает нашу модель неприменимой.
Во-вторых, модель отражает лишь временные соотношения и не содержит пространственных. Это справедливо при анализе установившихся процессов с периодическим изменением всех переменных, однако совершенно не отражает фактического положения в переходных режимах, когда существенный, а иногда и определяющий характер имеют свободные составляющие переменных. Поэтому и схема замещения, и векторная диаграмма пригодны только для анализа установившихся процессов.
В-третьих, модель неудобна, а чаще просто неприменима, если мы хотим в процессе управления двигателем формировать определенным образом за счет быстрых воздействий его токи и момент. В современных системах, так называемого векторного управления, мало иметь временные векторы, нужны и пространственные, т.е. другая модель.
Не задаваясь пока целью получения строгих формул, оценим главные черты любой механической характеристики, т.е. связи момента и скольжения (или скорости) с помощью универсального выражения для момента:
![]() ,
(4.10)
,
(4.10)
где k – некоторый конструктивный коэффициент; ![]() – активная составляющая тока
ротора;
– активная составляющая тока
ротора; ![]() – косинус угла между
– косинус угла между ![]() и
и ![]() .
.
Если мы проследим зависимость каждого из трех сомножителей в формуле (4.10) от скольжения (k примем постоянным), то получим представление и о произведении, т.е. об электромагнитном моменте машины.
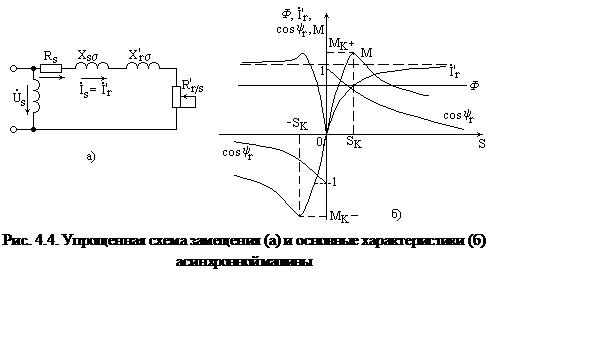
Магнитный поток (Ф) в первом
приближении, как мы уже отмечали, не зависит от скольжения (рис. 4.4, б).
Ток ротора в
соответствии с выражением (4.9) равен нулю при ![]() и асимптотически
стремится к величине
и асимптотически
стремится к величине ![]() при
при ![]() . Кивая
. Кивая ![]() показана
на рис. 4.4, 6.
показана
на рис. 4.4, 6.
Последний
сомножитель ![]() нетрудно
определить из векторной диаграммы:
нетрудно
определить из векторной диаграммы:
 .
(4.11)
.
(4.11)
Он, очевидно, близок к ±1 при малых s и асимптотически стремится к нулю при ![]() .
.
Теперь несложно представить качественно
механическую характеристику
(рис. 4.4, б): момент равен нулю при s = 0
(w = w0 ), достигает
положительного (Мк+) и отрицательного (Мк-)
максимумов или, как принято говорить, критических значений при некоторых
значениях скольжения ± sk, также называемых критическими, а затем при ![]() стремится к нулю за счет третьего
сомножителя.
стремится к нулю за счет третьего
сомножителя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.