Этим набором
номинальных величин обычно ограничиваются сведения, сообщаемые о двигателе
заводом – изготовителем. Легко заметить, что каталожных данных, вообще говоря,
недостаточно для восстановления по ним параметров схемы замещения
(см. рис. 4.3, а или 4.4, а). Однако если двигатель имеется в наличии, то можно
провести испытания и определить все, что необходимо.
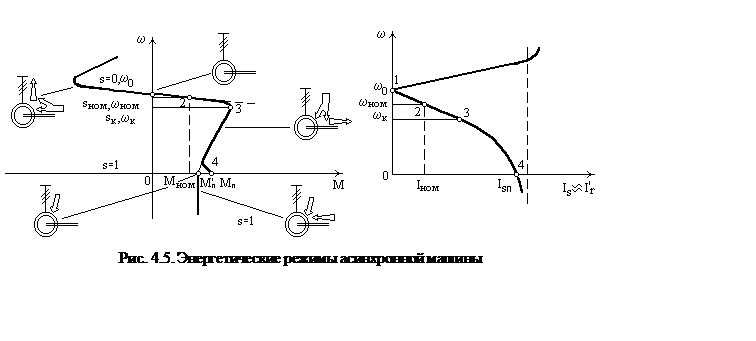 |
Точка 1 w0 и n0 (s = 0, M = 0) получится как ближайшая большая к nном из ряда для частоты fsном = 50 Гц: 3000, 1500, 1000, 750, 600 об/мин, что следует из формулы (4.3).
В качестве точки 2 примем номинальную wном или nном, М ном, Is ном, и для двигателя с фазным ротором s ном , Ir номопределим по формулам (4.6) и (4.9). Для обычных двигателей s ном лежит в пределах 0,01 – 0,05 (большие значения – для двигателей меньшей мощности).
Точка 3 – Мк и sк. По каталожному значению lMк находим Мк = lMкМном (обычно lMк = l,8 – 2,2) /11/; а по (4.17) – sк; для этого подставим в (4.17) s ном=(n0 – nком)/n0.
Рабочий участок механической характеристики для малых s, когда s/sк<< sк/s, иногда удобно представить в виде
![]() ,
(4.20)
,
(4.20)
а полную характеристику можно построить по (4.14) или (4.17).
Если нанести на
характеристики точку 4, определенную по каталожным кратностям пускового тока lIп и момента lMп (обычно для
короткозамкнутых двигателей lIп = 5 - 7,
lMп = 1,2 -
1,6; разумеется и здесь, и ранее указаны ориентировочные границы), то она не
совпадает с характеристиками
короткозамкнутого двигателя, так как эти двигатели специально проектируют так, чтобы иметь повышенный
пусковой момент (![]() ).
).
Имея механические характеристики (рис. 4.5), нетрудно назвать энергетические режимы, следуя правилам, обоснованным при рассмотрении электропривода постоянного тока. Правда, теперь не удастся столь же просто, как там, проследить направление потоков энергии в электрической части машины. Стрелками показана активная энергия; затраты на создание магнитного поля не показаны.

На рис. 4.5
отсутствует режим динамического торможения. Для осуществления такого режима
статорные обмотки,
соединенные любым образом, подключают к источнику постоянного тока (рис. 4.6, а),
благодаря чему создается неподвижное поле; скольжение ротора при этом следует определять следующим
образом: ![]() .
.
Если вращать ротор в этом поле, то в его обмотках будет наводиться ЭДС, а созданный ею ток, взаимодействуя с полем, создаст тормозной момент, т.е. физическая картина процесса в главном не будет отличаться от рассмотренной в разделе 3. Для машин постоянного тока механические и электромеханические Ir = f(s) характеристики будут иметь общую точку – начало координат.
Для более полного представления о характеристиках обычно переходят от постоянного тока (Iп) в обмотках статора к эквивалентному переменному (Iэкв), создающему такую же амплитуду МДС, как и фактически протекающий постоянный ток, и пользуются упрощенной векторной диаграммой (рис. 4.6,6). Поскольку Iэкв = const, магнитный поток сильно меняется: при s = 0 (w= 0) весь ток Iэкв является намагничивающим (нет I'r) и, если он значителен, машина может находиться в зоне насыщения. По мере роста s растет и I'r, но в силу увеличения частоты увеличивается yr и падает cosyr. Характер кривых показан на рис. 4.6, в.
Для расчета характеристик в режиме динамического торможения можно пользоваться формулами, очень похожими на выведенные ранее /1,5/:
 ;
(4.21)
;
(4.21)
![]() ;
(4.22)
;
(4.22)
в которых
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.