. . . . . . . . . . . . . .
un = t1nv1 + t2nv2 + ... +tnnvn.
Определение 3. Матрицей перехода от базиса v , к базису u называется такая матрица
 , столбцы которой есть
соответствующие координатные столбцы векторов второго базиса u в первом
базисе v.
, столбцы которой есть
соответствующие координатные столбцы векторов второго базиса u в первом
базисе v.
В силу (4) связь между базисами и матрицей перехода можно записать в виде:
(u1,
u2, ..., um) = (v1,
v2, ..., vn)  , или
, или
u = vT. (5)
C другой стороны, если T¢ - матрица перехода от базиса u к базису v , то
v = uT¢. (6)
Из (5) и (6) получаем
u = (uT¢)T = u(T¢T) , v = (vT)T¢ = v (TT¢). (7)
Лемма 1. Пусть А, В матрицы размерности m´n c элементами из поля Р и v = (v1, v2, ..., vn) - базис n-мерного векторного пространства на Р. Если vA = vB, то A = B.
Доказательство. Пусть
 ,
,  .
.
Тогда по определениям умножения и равенства матриц равенство vA = vB запишется в виде m векторных равенств:
a1jv1 + a2jv2 + ... + anjvn = b1jv1 + b2jv2 + ... + bnjvn; j = 1, 2, ...,m.
В силу условия равенства векторов, записанных в координатной форме находим aij = bij; i = 1, 2, ...,n; j = 1, 2, ...,m. Отсюда A = B. Лемма доказана.
Так как v = vЕ и u = uE , то из равенств (7) по лемме 1 получаем T¢T = TT¢ = Е. Отсюда detT ¹ 0 , T¢ = T-1 и доказана теорема.
Теорема 3. Матрица перехода от одного базиса к другому является невырожденной матрице. Матрицы перехода от первого базиса ко второму и от второго базиса к первому базису являются взаимно обратными матрицами.
4. Преобразование координат вектора. Найдем связь между координатными столбцами произвольного вектора a в базисах v и u. Пусть (x1 ,x2 ,... ,xn)t и (x1¢ ,x2¢ ,... ,xn¢)t - координатные столбцы вектора a в базисах v и u . Тогда по формуле (3)
a = v×(x1 ,x2 ,... ,xn)t , a = u×(x1¢ ,x2¢ ,... ,xn¢)t .
Отсюда по формуле (6) находим
a = v×(x1 ,x2 ,... ,xn)t = (uT)×(x1¢ ,x2¢ ,... ,xn¢)t =u(T×(x1¢ ,x2¢ ,... ,xn¢)t)
и по лемме 1
(x1 ,x2 ,... ,xn)t = T×(x1¢ ,x2¢ ,... ,xn¢)t . (8)
Отсюда по определению равенства матриц получаем систему равенств:
x1 = t11x1¢ + t12x2¢ + ... + t1nxn¢,
x2 = t21x1¢ + t22x2¢ + ... + t2nxn¢,
. . . . . . . . . . . . . . . . (9)
xn = tn1x1¢ + tn2x2¢ + ... + tnnxn¢.
Полученные формулы (8) или (9) называются формулами преобразования координат, а матрица T так же называется матрицей преобразования координат.
5. Условие линейной независимости векторов в координатной форме. Рассмотрим систему векторов ai = ai1v1 + ai2v2 + ... +ainvn, i =1, 2, …, k. Составим векторное уравнение
x1a1 +x2a2 + ...+ xkak = 0. (10)
В силу условия равенства векторов координатной форме уравнение (10) равносильно системе n линейных уравнений с k неизвестными:
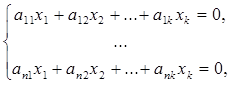 (11)
(11)
Система (11) имеет нулевое решение. По теореме Кронекера-Капелли она имеет единственное нулевое решение тогда и только тогда, когда ранг матрицы системы равен k. Отсюда получаем следующую теорему.
Теорема 4. Система k векторов n-мерного векторного пространства линейно независима тогда и только тогда, когда ранг матрицы, составленной из координат этих векторов в некотором базисе, равен k.
Следствие 1. Упорядоченная система из n векторов образует базис n-мерного векторного пространства тогда и только тогда, когда ранг матрицы, составленной из координат этих векторов в некотором базисе, равен n.
Ранг квадратной матрицы порядка равен тогда и только тогда, когда определитель матрицы не равен нулю. Таким образом получаем следующее утверждение.
Следствие 2. Упорядоченная система из n векторов образует базис n-мерного векторного пространства тогда и только тогда, когда равен нулю определитель, составленной из координат этих векторов в некотором базисе.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.