




Лекция 6 проф.
Содержание лекции 5. Изложены основные правила преобразования структурных схем ДСАУ. Даны примеры типовых преобразований. Показано различие формирования структурных схем, как расчетных и имитационных моделей. В этой лекции продолжается изложение той же темы.
ГЛАВА 3. Структурные схемы. Передаточные функции ДСАУ
3. 6. Передаточные функции (ПФ) ДСАУ с датчиками обратной связи
В этом разделе мы уделим основное внимание включению в структуру САУ датчиков - преобразователей информации. Ограничимся исследованием только влияния датчиков в цепи главной обратной связи на свойства ДСАУ. Это позволит уяснить многие аспекты задачи.
 |
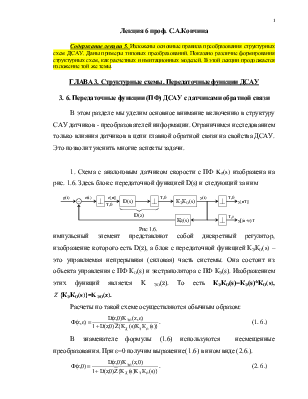
Рис 1.6.
импульсный элемент представляют собой
дискретный регулятор, изображение которого есть D(z), а блок с передаточной
функцией КЭКО(s) – это управляемая непрерывная (силовая)
часть системы. Она состоит из объекта управления с ПФ КО(s) и
экстраполятора с ПФ КЭ(s). Изображением этих функций является K ЭО(z). То есть КЭКО(s)=КЭ(s)*КО(s),
![]() {КЭКО(s)}=KЭО(z).
{КЭКО(s)}=KЭО(z).
Расчеты по такой схеме осуществляются обычным образом:
![]() . (1.
6.)
. (1.
6.)
В знаменателе формулы (1.6) используются несмещенные преобразования. При ε=0 получим выражение( 1.6) в ином виде (2.6.).
![]() .
(2. 6.)
.
(2. 6.)
Однако на практике такая схема встречается редко. Гораздо шире распространено применение другой структуры.
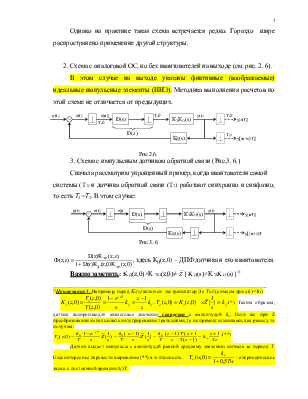
2. Схема с аналоговой ОС, но без квантователей на выходе (см. рис. 2. 6).

В этом случае
на выходе указаны фиктивные (воображаемые) идеальные импульсные элементы (ИИЭ). Методика выполнения расчетов по этой
схеме не отличается от предыдущих.
Рис.2.6.
3. Схема с импульсным датчиком обратной связи (Рис.3. 6.)
Сначала рассмотрим упрощенный пример, когда квантователи самой
 |
Рис.3. 6.
![]() , здесь КД(z,0) – ДПФ
датчика и его квантователя.
, здесь КД(z,0) – ДПФ
датчика и его квантователя.
Важно заметить: K Д(z,0)×K ЭО(z,0)≠ ![]() {K Д(s)×K ЭK О(s)}1)
{K Д(s)×K ЭK О(s)}1)
___________________________________________________________________________
1)Примечание 1.Например, перед Kд(s) включен экстраполятор Э0. Тогда имеем при y(t)=1(t)
![]() .(*)
Таким образом, датчик воспроизводит
аналоговое значение скорости с амплитудой kд. Если же при Z преобразовании
использовать интегрирование трапециями, (а не прямоугольниками, как ранее), то
получим:
.(*)
Таким образом, датчик воспроизводит
аналоговое значение скорости с амплитудой kд. Если же при Z преобразовании
использовать интегрирование трапециями, (а не прямоугольниками, как ранее), то
получим:
![]() .(**)
.(**)
Датчик выдает импульсы с амплитудой
равной среднему значению сигнала за период Т. Еще интереснее перевести
выражение (**) в w плоскость. ![]()
![]() - апериодическое звено с постоянной
времени 0,5Т.
- апериодическое звено с постоянной
времени 0,5Т.
В примечании 1 показано, что в этом случае при наличии одинаковых экстраполяторов в прямой цепи и в обратной связи можно получить разные структуры даже при Т1=Т2..
4. Та же схема при T1≠T2 – "многочастотная ДСАУ". Обязательным требованием к таким структурам является кратность периодов квантователей "к". Причем, "к" может быть и нецелым числом. Поэтому чаще многочастотные ДСАУ называют многократными. Однако "синфазность" в работе квантователей необходима и в таких системах2).
В этом случае передаточную функцию естественно записать так:
![]()
Решим задачу (*) из
примечания 1 при T1=2T2.
Тогда, ![]() .
.
Датчик так же выдает импульсы с амплитудой kд, но только в два раза чаще, чем квантователь в главной цепи. Итак, половина информации датчика не используется. Иное дело с датчиком "средних значений" (**). Теперь его значения выхода вычисляются на полу периоде T2.
Следовательно, они точнее отражают передаваемую информацию. Этим мы показали , что выбор многократности или однократности дискретных элементов в системе решается неоднозначно и требует грамотного инженерного подхода. Однако естественнее иметь передаточную функцию зависимой только от одного аргумента, тем более что введенные переменные не независимы: z2=exp(sT2)=exp(skT1)=exp(sT1)k=z1k.
Теперь рассмотрим влияние инерционности датчика на характеристики САУ. Для непрерывной (аналоговой) системы можно записать:
![]() ;
; ![]() ,
(3. 6.) где τ постоянная времени
датчика (в секундах).
,
(3. 6.) где τ постоянная времени
датчика (в секундах).
Решить (3. 6) можно
только при заданной зависимости y(t), например, - линейной, ![]() начальное
значениеннy"y" при t=0.
начальное
значениеннy"y" при t=0.
Тогда решение будет таким:
![]() (4. 6.)
(4. 6.)
_______________________________________________________________
2) Примечание 2. Синфазность здесь понимается в том смысле, что моменты замыкания ИИЭ в основной цепи T1 и в обратной связи T2 будут: T1=кT2,, где T1>T2.
В частном, но достаточно частом случае3), при tз≥3τ , выражение
(4. 6.) имеет такой вид:
 (5.6.)
(5.6.)
В примечании 3 рассмотрены подробно условия достоверности информации, получаемой от датчика в аналоговой САУ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.