












 |
Курсовая работа
по учебной дисциплине "Теория управления"
Тема:
“Синтез системы автоматического управления”
Выполнил: " "____________ 200 г.
Студент группы 4083/1,2
(подпись)
Преподаватель: [ученое звание: ассистент (ас.), доцент (доц.), профессор (проф.)] принял (подпись)
" "____________ 200 г
Санкт-Петербург
200 г.
Введение. (Оно поясняет цель работы, её задачи и основы методов их решения. Текст введения не следует помещать в пояснительную записку к курсовой работе).
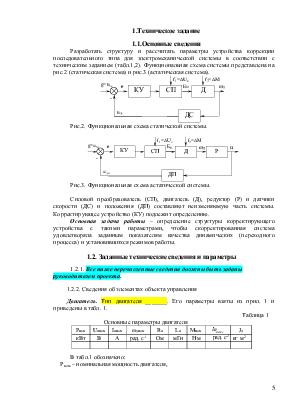
1. Техническое задание.
1.2. Заданные технические сведения и параметры
2. Разработка структурной схемы модели электромеханической системы (ЭМС) и расчет параметров её звеньев.
2.1. Исходные положения
2.2. Параметры структурной схемы моделей двигателя и механизма.
2.3. Параметры модели усилителя мощности
2.4. Параметры нескорректированной части модели системы.
3. Графические построения для решения задачи "динамического синтеза" корректирующего устройства для ЭМС.
3.1. Логарифмическая амплитудно-частотная характеристика нескорректированной разомкнутой системы.
3.2. Построение " запретной зоны по точности" для "желаемой" логарифмической амплитудно-частотной характеристики скорректированной системы по заданным динамическим и статическим параметрам механизма.
3.3. Построение " разрешенной зоны " для "желаемой" логарифмической амплитудно-частотной характеристики скорректированной системы по предельным динамическим параметрам двигателя.
3.4. Расчет параметров и построение "желаемой" логарифмической амплитудно-частотной характеристики скорректированной системы.
3.5. Построение логарифмической амплитудно-частотной характеристики корректирующего устройства (КУ), выбор его структуры и параметров.
4. Исследование синтезированной системы и определение ее показателей качества.
4.1. Отработка сигналов управления линейной моделью ЭМС.
4.2. Отработка сигналов управления нелинейной моделью ЭМС.
4.3. Отработка основного возмущения моделью ЭМС.
5. Анализ результатов курсовой работы.
Введение
Синтез является главной и основной задачей, решаемой в теории автоматического управления (ТАУ). При анализе системы автоматического управления (САУ) производится оценка влияния вариаций параметров и возмущений на показатели её качества и устойчивость. Синтезом САУ называется выбор ее структуры и параметров, которые обеспечивают заданные показатели качества работы. При решении задачи синтеза воздействия на систему могут задаваться двояким образом.
1. Если управляющие сигналы и возмущения считать детерминированными, то в реальных условиях работы системы могут происходить неучтенные изменения этих величин, а, следовательно, и изменения качества её динамических режимов в процессе эксплуатации. Поэтому такой синтез называют не оптимальным;
2. Для решения задачи оптимального синтеза управляющие воздействия и контролируемые возмущения, но не помехи, должны быть известными случайными функциями, которые заданы своими вероятностными характеристиками.
Таким образом, для реализации оптимального синтеза
необходима полная априорная информация о случайных воздействиях на САУ. Такой
информацией проектировщик никогда не обладает. Поэтому Виктором Антоновичем
Бесекерским (доктором техн. наук, профессором, выпускником кафедры САУ – 1939г)
в 50 – е годы XX в.
был предложен метод синтеза САУ при сигнале управления g(t), который является случайным воздействием. Сигнал g(t) определяется только предельными значениями
своих некоррелированных первых двух производных ![]() и
и
![]() некоторым гармоническим
эквивалентным сигналом gэ(t).Параметры
эквивалентного сигналаgэ(t)оцениваются
значениями упомянутых производных. Такой метод после длительной апробации в
проектной практике конструирования различных систем был назван автором
«методом динамического синтеза САУ». Этим методом определяются
структура и параметры реальных САУ, показатели качества динамических и
статических характеристик которых не выйдут из заданных пределов, практически,
при любом изменении воздействия g(t) с заданными ограничениями его производных. [1].
некоторым гармоническим
эквивалентным сигналом gэ(t).Параметры
эквивалентного сигналаgэ(t)оцениваются
значениями упомянутых производных. Такой метод после длительной апробации в
проектной практике конструирования различных систем был назван автором
«методом динамического синтеза САУ». Этим методом определяются
структура и параметры реальных САУ, показатели качества динамических и
статических характеристик которых не выйдут из заданных пределов, практически,
при любом изменении воздействия g(t) с заданными ограничениями его производных. [1].
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.