ДПТ НВ с регулятором по Баттерворту, с учётом обратной связи по ЭДС якоря
Цель работы
Изучить влияние воздействия регулятора, синтезированного по Баттерворту, на показатели качества САУ ДПТ НВ, если учитывается обратная связь по ЭДС якоря электродвигателя.
Краткие теоретические сведения
Если в САУ скоростью. ДПТ
НВ при отсутствии колебаний нагрузки (![]() )
не пренебрегать ЭДС якоря электродвигателя, то ее структурную схему по рис. 4.
сначала следует привести к однозначному варианту, представленному на рис. 8.
)
не пренебрегать ЭДС якоря электродвигателя, то ее структурную схему по рис. 4.
сначала следует привести к однозначному варианту, представленному на рис. 8.
А теперь по Баттерворту
[3] можно синтезировать регулятор двумя способами в зависимости от соотношения
между ![]() и
и ![]()
Если коэффициент затухания
 , то контур с обратной
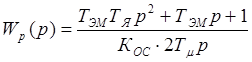
связью по ЭДС якоря будет иметь передаточную функцию
, то контур с обратной
связью по ЭДС якоря будет иметь передаточную функцию
 , где
, где  - малая по
- малая по![]() стоянная времени,
стоянная времени,
 - большая постоянная времени.
- большая постоянная времени.
В этом случае по Баттерворту
 .
.
Если же ![]() , то
, то
 , где
, где ![]() .
.
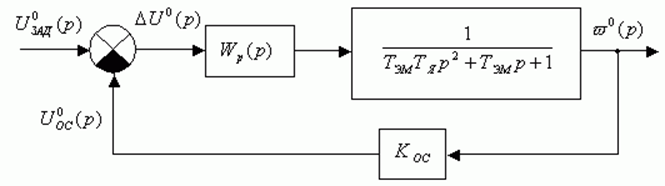
Рис. 9 Структурная схема одноконтурной САУ скоростью ДПТ НВ с регулированием по отклонению с учетом обратной связи по ЭДС якоря
В первом случае требуется ПИ-регулятор, схема модели которого представлены на рис. 10а, а во втором случае - И-регулятор с форсирующим звеном второго порядка схема которого показана на рис. 10б.
Причём в первой схеме условия эквивалентности
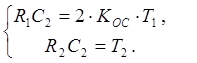 (2.1)
(2.1)
а во второй
![]()
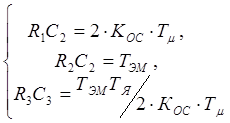 (2.2)
(2.2)
a)
б)
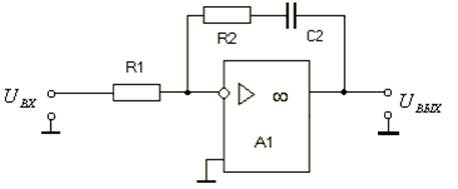
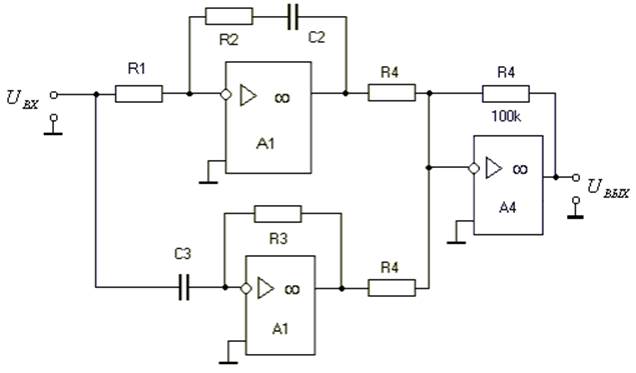
Рис. 10 Электронные модели ПИ-регулятора (а) и
И-регулятора с форсированием 2-го порядка (б)
Расчётное задание
Сохраняется расчетное задание и результаты расчета для САУ с регулированием по отклонению.
Только бывший П-регулятор перестраивается либо на ПИ-регулятор, согласно схемы рис. 10а и соотношений (2.1), либо на И-регулятор с форсированием второго порядка, согласно схемы рис.10б и соотношений (2.2).
Программа лабораторной работы
Повторяется программа лабораторной работы 2.1, но с другими типами регуляторов.
СОДЕРЖАНИЕ
Лабораторный цикл 1
Исследование статических свойств системы автоматического управления скоростью электродвигателя постоянного тока независимого возбуждения 4
Статические характеристики и статизм разомкнутой системы управления электродвигателем постоянного тока независимого возбуждения 4
Лабораторная работа № 1.2
Статические характеристики и статизм одноконтурных замкнутых систем управления скоростью электродвигателя постоянного тока 14
Лабораторный цикл 2
Исследование динамических свойств системы автоматического управления скоростью электродвигателя постоянного тока независимого возбуждения 20
Показатели качества системы автоматического управления скоростью ДПТ НВ с регулятором по Баттерворту без учёта обратной связи по ЭДС якоря 20
Лабораторная работа 2.2
ДПТ НВ с регулятором по Баттерворту, с учётом обратной связи по ЭДС якоря 22
1. М/ук 2304. Луковников В.И. , Захаренко В.С. , Практическое пособие к РГР по дисциплинам ТАУ и ОММ для студентов специальности Т.11.02.01 / Гомель: ГГТУ, 1998. – 34с.
2. М/ук 2756 Луковников В.И. , Захаренко В.С. , Практическое пособие к РГР по дисциплине ОММ для студентов специальности Т.11.02.01 / Гомель: ГГТУ, 2002.
3. Анхимюк В.П. , Опейко О.Ф. , Михеев Н.Н. Теория автоматического управления. – Мн.: Дизайн ПРО. –2000. – с.351.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.