0 £Uвх£ 1.64В для 0 £Uзад£UзадN = 10B,
0 £Uвых£ 10В для 0 £w£wN = 62.83 с-1,
0 £Uст£ 3.46В для 0 £ Мст £ МN = 175 Н×м.
а)
б)
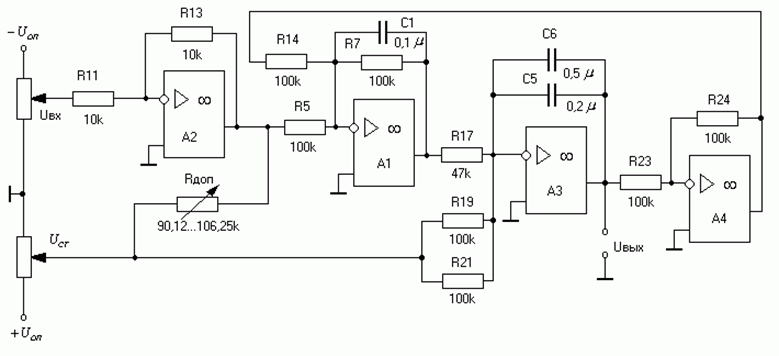
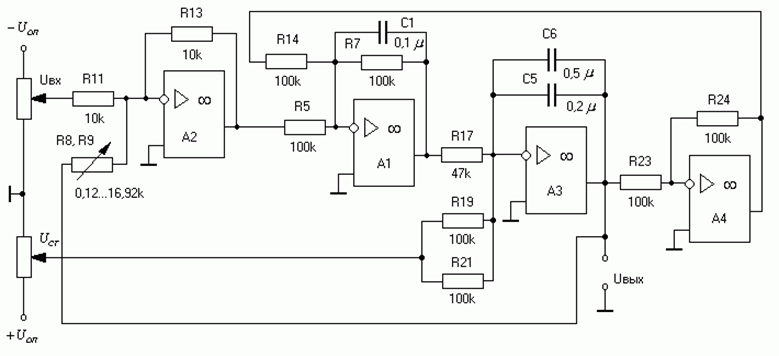
Рис. 6 Принципиальные схемы модели САУ с регулированием по возмущению (а) и по отклонению (б)
Программа лабораторной работы
1. Произвести расчёт коэффициента передачи компенсирующей обратной связи, составить и начертить принципиальную схему модели САУ с регулированием по возмущению.
2. Произвести расчёт коэффициентов передачи стабилизирующей обратно связи и П-регулятора, составить и начертить принципиальную схему модели САУ с регулированием по отклонению.
3. На наборном поле стенда собрать поочерёдно схемы моделей САУ, настроить обратные связи и регуляторы, экспериментально снять их механические характеристики для трёх значений напряжения Uвх, соответствующих 0.5; 0.75; 1.0 Uзад,N.
4. По результатам эксперимента построить механические характеристики САУ, пересчитав сигналы моделей uвх, uвых, uст в реальные физические величины uзад, w, Мст.
5. Критическим сравнением расчётных и экспериментальных характеристик по внешнему виду и величине статизма сделать вывод о влиянии на них правильности настройки обратных связей и регуляторов.
ЛАБОРАТОРНЫЙ ЦИКЛ 2
Исследование динамических свойств системы автоматического управления скоростью электродвигателя постоянного тока независимого возбуждения
Показатели качества системы автоматического управления скоростью ДПТ НВ
с регулятором по Баттерворту без учёта
обратной связи по ЭДС якоря
Цель работы
Изучить влияние воздействия регулятора, синтезированного по Баттерворту, на показатели качества САУ ДПТ НВ, если не учитывается обратная связь по ЭДС якоря электродвигателя.
Краткие теоретические сведения
Если в САУ скоростью ДПТ
НВ при отсутствии колебаний нагрузки (![]() )
пренебречь влиянием ЭДС якоря электродвигателя, то согласно рис. 4б структурная
схема САУ примет вид, представленный на рис. 7, где регулятор пока не
определён.
)
пренебречь влиянием ЭДС якоря электродвигателя, то согласно рис. 4б структурная
схема САУ примет вид, представленный на рис. 7, где регулятор пока не
определён.
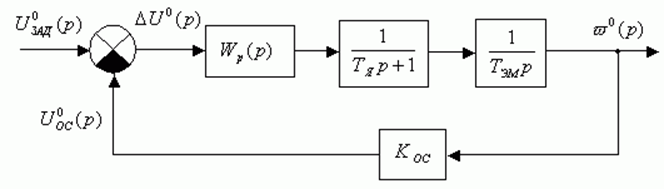
Рис. 7 Структурная схема одноконтурной САУ скоростью ДПТ НВ с регулированием по отклонению без учёта обратной связи по ЭДС якоря
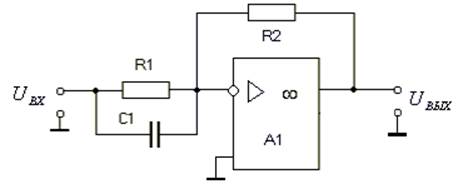
Рис. 8 Электронная модель форсирующего регулятора первого порядка
В реальных САУ в состав общего регулятора входят силовые электронные блоки и постоянные времени и коэффициенты передачи.
Здесь для простоты восприятия действия регулятора будем считать, что эти блоки безинерционны а их коэффициент передачи равен 1.
Тогда в соответствии с
распределением корней характеристического уравнения системы по Баттерворту [3]
синтезируем передаточную функцию регулятора, считая ![]() большой
постоянной времени в виде
большой
постоянной времени в виде
 , где малую постоянную
времени
, где малую постоянную
времени ![]() можно принять равной (0,1-0,2)
можно принять равной (0,1-0,2)![]() .
.
Это форсирующий регулятор первого порядка и его электронная схема представлена на рис. 7.
Согласно схемы должны быть выполнены следующие условия эквивалентности
 ,
,
![]() .
.
Расчётное задание
Сохраняется расчётное задание и результаты расчета лабораторной работы 1.1 для САУ с регулированием по отклонению. Только бывший П-регулятор перестраивается на форсирующий согласно схемы на рис. 7. и соотношений (1.8).
Программа лабораторной работы
1. Произвести расчет коэффициента передачи и постоянной времени регулятора и начертить принципиальную схему САУ с регулятором
2. На наборном поле стенда сначала собрать схему САУ с П-регулятором и снять её переходные характеристики.
3. Затем собрать схему с синтезированным регулятором и снять её переходные характеристики.
4. Критическим сравнением экспериментов по п.2. и п.3. сделать вывод о влиянии типа регуляторов на показатели качества САУ.
Лабораторная работа 2.2
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.