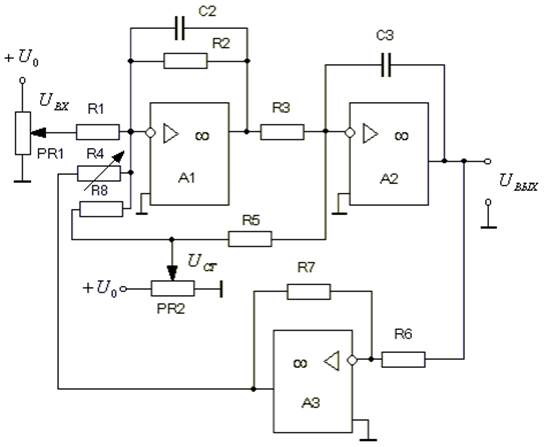
Электронная модель САУ с регулированием по возмущению представлена на рис. 5а. Сравнивая её с моделью ДПТ НВ, можно заметить, что компенсирующая обратная связь осуществляется за счёт переменного резистора R8.
При этом операционный усилитель А1 моделирует не только якорную цепь, но и П-регулятор с коэффициентом передачи Кр = R2/R1 и обратную связь с коэффициентом передачи
Кос = R2/R8.
Требуемая настройка на нулевой статизм (13) может быть получена с помощью переменного резистора при
 , (15)
, (15)
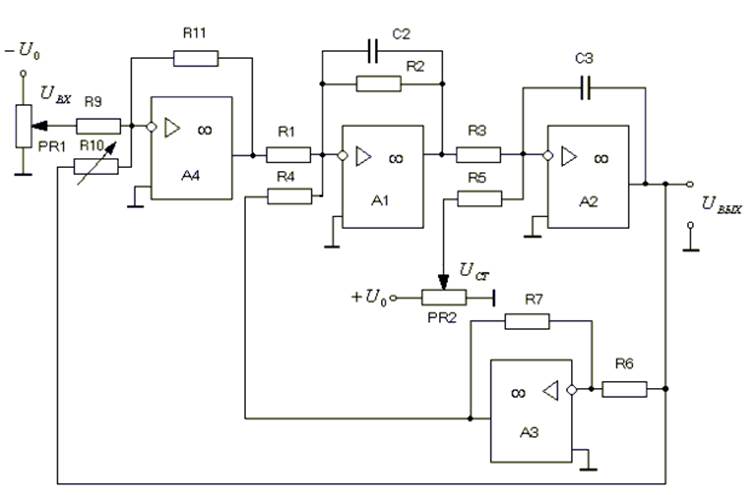
Электронная модель САУ с регулированием по отклонению представлена на рис. 5б. Сравнивая её с моделью двигателя можно увидеть, что стабилизирующая обратная связь осуществляется за счёт переменного резистора R10.
При этом операционный усилитель А4 моделирует устройство сравнения, регулятор и обратную связь с коэффициентом передачи Кр = R11/R9 и Кос,мод = R11/R10.
Как известно, коэффициент обратной связи САУ с регулированием по отклонению рассчитывается из условия равенства нулю отклонения в номинальном установившемся режиме. Это даёт для САУ
 .
.
Поскольку в модели в этом случае
 , то, используя уравнения связи
реальных и моделирующих переменных (1.1.3.), запишем уравнение настройки
обратной связи в виде
, то, используя уравнения связи
реальных и моделирующих переменных (1.1.3.), запишем уравнение настройки
обратной связи в виде
 .
(16)
.
(16)
Требуемая настройка на статизм, не превышающий заданную величину, определяется согласно (14) соотношением.
 . (17)
. (17)
Расчётное задание
Задание на расчёт механических характеристик САУ с регулированием по возмущению и по отклонению основывается на задании к лабораторной работе № 1.1.
Дополнительно к этому даются расчётные данные в таблице 2.1.
Таблица 2.1
Задание на расчёт коэффициентов передачи обратных связей и регуляторов
|
Варианты (№ бригады) |
1 |
2 |
3 |
4 |
5 |
|
|
Uзад |
В |
10 |
9 |
11 |
9 |
10 |
|
[Sсау] |
о.е. |
0,09 |
0,1 |
0,09 |
0,11 |
0,1 |
Исследуется тот же самый двигатель, поэтому принципиальная схема модели ДПТ НВ сохраняется.
Для рассмотренного выше примера расчёта принципиальная схема модели ДПТ НВ представлена на рис. 3.
Для схемы САУ с регулированием по возмущению в неё достаточно включить компенсирующую обратную связь с помощью переменного резистора между выходом инвертора на операционном усилителе А2 и инверсным входом усилителя А1.
Величина переменного резистора в этом случае будет согласно (15) равна
 Ом,
Ом,
Поскольку в стенде такого переменного резистора нет, то его придётся специально создавать из последовательного соединения R1, R2, и Rдоп. Выбрав Rдоп = 90 кОм, получим
![]() Ом,
Ом,
Диапазоны изменения сигналов модели при эксперименте остаются теми же, что были рассчитаны в для ДПТ НВ.
Для схемы САУ с регулированием по отклонению стабилизирующую обратную связь можно включить с помощью переменного резистора между выходом усилителя А4 и инверсным входом П-регулятора на усилителе А2.
Согласно (16) величина коэффициента передачи обратной связи будет равна для
![]() В,
В,
 .
.
а)
б)
Рис. 5 Электронные модели САУ с регулированием по возмущению (а) и отклонению (б)
Коэффициент передачи П-регулятора согласно (17) найдём для [Sсау] = 0.1 как
 .
.
Величины входных сопротивлений R9, R10 и сопротивлений обратной связи R11 операционного усилителя А2, моделирующего П-регулятор, обратную связь и устройство сравнения, выберем из комплектующих стенда следующим образом
![]() кОм,
кОм,
![]() кОм,
кОм,
![]() ,
, ![]() кОм,
кОм,
![]() кОм,
кОм,
![]() кОм.
кОм.
Если здесь выбрать тоже самое базовое напряжение Uo = 10 В, тогда уравнения связи сигналов модели и реальных величин будут иметь вид
 ,
,
 ,
,
 .
.
Отсюда можно определить диапазоны изменения сигналов модели при эксперименте
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.