Исключая промежуточные
переменные ![]() и
и ![]() ,
общее операторное уравнение электронной модели ДПТ НВ в относительных переменных
,
общее операторное уравнение электронной модели ДПТ НВ в относительных переменных
 ,
,  и
и
 , где
, где ![]() -
базовое напряжение, можно записать так
-
базовое напряжение, можно записать так
 (5)
(5)
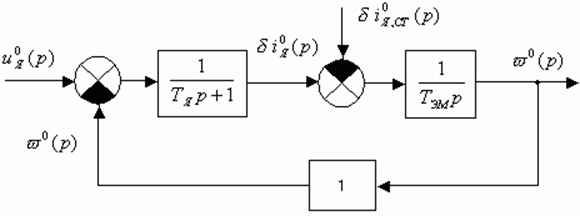
Сопоставляя уравнения (4)
и (5) , можно установить, что адекватность структурной схемы и ![]() электронной модели ДПТ НВ, когда
электронной модели ДПТ НВ, когда ![]() ,
, ![]() и
и
![]() , будет достигнута при выполнении
уравнений связи
, будет достигнута при выполнении
уравнений связи
 |
 ,
,  ,
,
 ,
, а)
 б)
б)
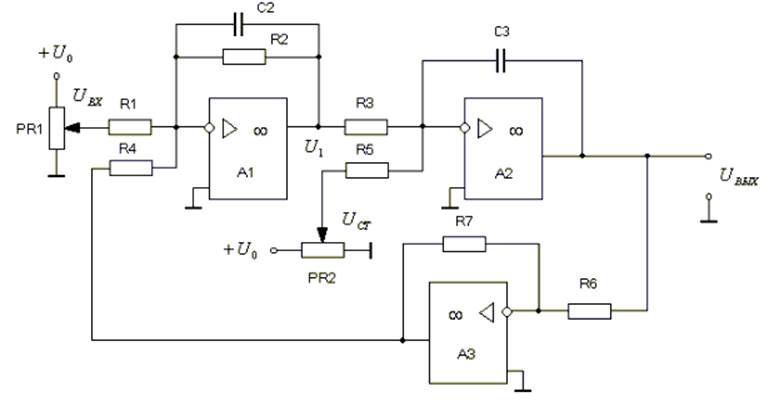
Рис. 1 Структурная схема (а) и электронная модель (б) ДПТ НВ
1.1.3.Статическая характеристика и
статизм элементов и систем автоматического управления
Под статическими
характеристиками элементов и систем автоматического управления понимают
зависимости ![]() или
или ![]() , получаемые в установившемся
режиме (
, получаемые в установившемся
режиме ( ![]() - возмущение).
- возмущение).
Для описания
электродвигателей и систем управления ими (автоматизированных электроприводов)
наиболее часто используются семейства статических характеристик второго вида, называемые
механическими характеристиками и представляемые зависимостями ![]() .
.
Эти зависимости можно
получить, подставляя в уравнение ДПТ НВ (4) р=0 (установившийся режим),
сначала в относительных переменных ![]() , а затем и в
абсолютных переменных
, а затем и в
абсолютных переменных
 , (7)
, (7)
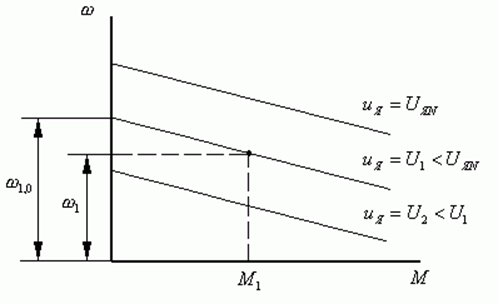
Механическая
характеристика ДПТ НВ представлена на рис. 2а, где обозначено: ![]() - момент нагрузки на валу
двигателя,
- момент нагрузки на валу
двигателя, ![]() - угловая скорость,
соответствующая моменту нагрузки
- угловая скорость,
соответствующая моменту нагрузки ![]() ,
, ![]() - угловая скорость холостого хода
(при отсутствии нагрузки на валу).
- угловая скорость холостого хода
(при отсутствии нагрузки на валу).
Влияние нагрузки (возмущения) на угловую скорость оценивают величиной статизма электродвигателя, рассчитываемого обычно для номинального режима,
 . (8)
. (8)
Статизм характеризует не только величину относительной ошибки скорости по моменту, но и наклон (жёсткость) механической характеристики.
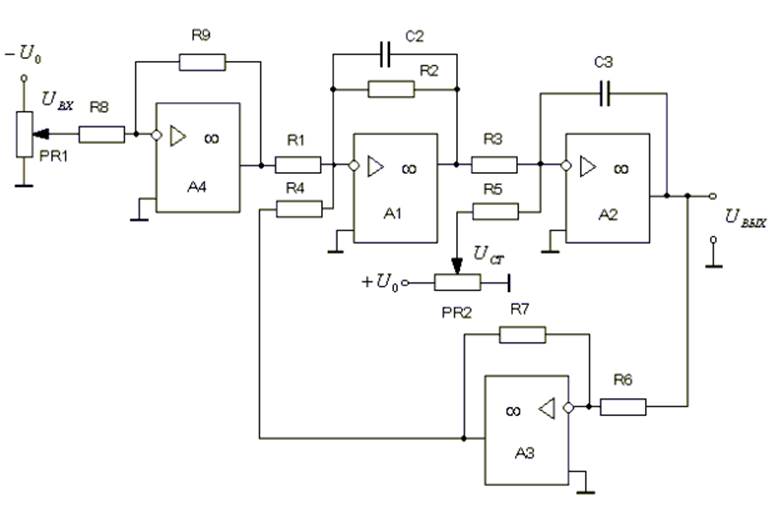
Аналогичные механические характеристики и статизм имеет и разомкнутая система автоматического управления ДПТ НВ, электронная модель которой представлена на рис. 2.б.
Наличие в ней
П-регулятора (А4, R8, R9) приводит лишь к тому,
что сигналом управления вместо якорного напряжения ![]() становится
напряжение задания
становится
напряжение задания  , где
, где  - коэффициент передачи регулятора
- коэффициент передачи регулятора
По результатам
моделирования можно рассчитать характеристики ДПТ НВ и разомкнутой САУ, имея в
виду, что  ,
,  ,
,
 и
и ![]() .
.
Расчётное задание
Задание на расчёт механических характеристик и статизма ДПТ НВ и разомкнутой САУ его скоростью выбирают по табл. 1.1. согласно номера бригады и номера студента в бригаде.
Рассчитаем, например, характеристики по заданию для студента №3 в бригаде №5, в котором записаны следующие технические параметры ДПТ НВ:
![]() кВт;
кВт; ![]() oб/мин;
oб/мин; ![]() Нм;
Нм;
![]() В;
В; ![]() А;
А; ![]() Ом.
Ом.
![]() с;
с; ![]() ;
кг×м2
;
кг×м2
Расчёт будем вести по соотношению (7), в котором конструктивная константа двигателя
 Нм/А.
Нм/А.
Тогда уравнение механической характеристики ДПТ НВ будет следующим
 , (9)
, (9)
а)
б)
Рис. 2 Механические характеристики (а) и электронная модель разомкнутой САУ ДПТ НВ (б)
Статизм электродвигателя найдём по выражению (8) для номинальной скорости
 , определив скорость холостого хода
, определив скорость холостого хода
![]() по характеристике (9)
по характеристике (9)
![]() ,
,
 ,
,
Зададим коэффициент
передачи П-регулятора по рекомендации примечания к таблице 1.1 так, чтобы ![]() В
В
 ,
,
Тогда уравнение механической характеристики разомкнутой САУ будет иметь вид
 ,
(10)
,
(10)
Находя по уравнению (10) номинальную скорость двигателя в САУ
![]()
![]() , и скорость холостого хода
, и скорость холостого хода
![]()
![]() , определим,
что разомкнутая САУ статизм не изменяет
, определим,
что разомкнутая САУ статизм не изменяет ![]() .
.
Теперь рассчитаем параметры электронных моделей ДПТ НВ и САУ, имея в виду, что на передней панели лабораторного стенда смонтированы элементы со следующими значениями номинальных параметров:
Резисторы: ![]() кОм ;
кОм ;
![]() Ом;
Ом; ![]() кОм;
кОм;
![]() кОм;
кОм; ![]() кОм;
кОм;
![]() кОм;
кОм; ![]() кОм;
кОм;
![]() кОм.
кОм.
Конденсаторы: ![]() мкФ;
мкФ; ![]() мкФ;
мкФ;
![]() мкФ.
мкФ.
Микросхемы К544УД2.
Диоды Д220.
ВНИМАНИЕ: Источники
входного напряжения и напряжения статической нагрузки, обозначенные на панели ![]() и
и ![]() ,
включаются одновременно тумблерами S3 и S4
При этом общее гнездо переменных резисторов должно быть подключено к «земле».
Регулируемые напряжения
,
включаются одновременно тумблерами S3 и S4
При этом общее гнездо переменных резисторов должно быть подключено к «земле».
Регулируемые напряжения ![]() и
и ![]() снимаются с гнёзд движков
переменных резисторов.
снимаются с гнёзд движков
переменных резисторов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.