ПРИМЕЧАНИЕ: Коэффициент
передачи П-регулятора разомкнутой САУ задать так, чтобы номинальное значение
напряжения задания составляло (0,01 … 0,1)![]() и
не превышало 10 В.
и
не превышало 10 В.
Отсюда можно определить диапазоны изменения сигналов модели при эксперименте
0 £Uвх£ 13.5В для 0 £Uя£UяN = 82B,
0 £Uвых£ 10В для 0 £w£wN = 62.83 с-1,
0 £Uст£ 3.46 для 0 £ Мст £ МN = 175 Н×м.
Следует иметь в виду, что для разомкнутой САУ входной сигнал должен быть в Кр раз меньше.
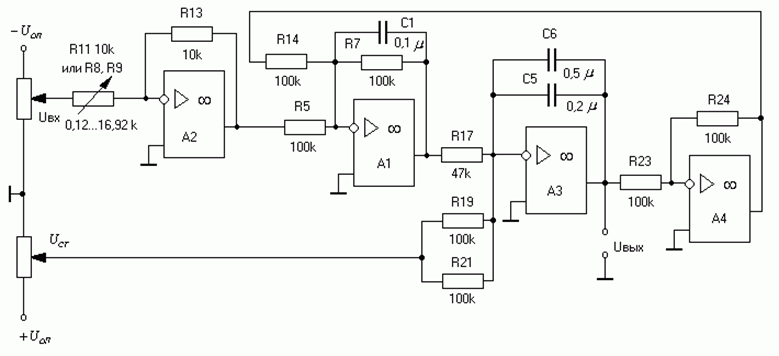
Рис. 3 Принципиальная схема модели ДПТ НВ и разомкнутой САУ
Программа лабораторной работы
1. Произвести расчёт механической характеристики, постоянных времени и статизма ДПТ НВ и его разомкнутой САУ.
2. Составить и начертить принципиальные схемы моделей двигателя и разомкнутой системы управления им.
3. На наборном поле стенда собрать схему модели ДПТ НВ и экспериментально снять её механическую характеристику Uвых(Uст) для трёх значений входного напряжения uвх, соответствующих 0.5; 0.75; 1.0 UЯN.
4. Собрать схему модели разомкнутой САУ ДПТ НВ и исследовать её экспериментально аналогично п. 3.
5. По результатам эксперимента построить механические характеристики, пересчитав сигналы моделей uвх, uвых, uст, uзад в реальные физические величины uя, w, Мст.
6. Критическим сравнением расчётных и экспериментальных характеристик по внешнему виду и величине статизма сделать вывод о физических причинах вида полученных характеристик, влиянии САУ на них, несовпадении результатов расчёта и эксперимента.
Лабораторная работа № 1.2
Статические характеристики и статизм
одноконтурных замкнутых систем управления скоростью электродвигателя постоянного тока
Цель работы
Изучить принципы построения одноконтурных замкнутых САУ с регулированием по возмущению и по отклонению. Аналитически и экспериментально исследовать влияние на вид их статических характеристик и величину статизма коэффициентов передачи регулятора и обратной связи.
Краткие теоретические сведения
В замкнутой САУ с регулированием по возмущению с помощью обратной связи на вход системы дополнительно к входному сигналу (задание) подаётся сигнал обратной связи, пропорциональный возмущению, с целью компенсации его негативного влияния.
При регулировании по отклонению на вход системы подаётся для сравнения с входным сигналом сигнал обратной связи, пропорциональный регулируемой величине. В первом случае обратная связь называется компенсирующей, во втором ¾ стабилизирующей.
В соответствии с этими принципами, основываясь на структурной схеме ДПТ НВ (рис. 1а), можно представить в наиболее простом виде структурные схемы САУ так, как это показано на рис. 4.
Действуя аналогично тому, как это было сделано в п. 1.1.1, можно получить уравнения для механических характеристик САУ сначала в относительных
![]()
 ,
,
а затем в абсолютных переменных
 , (11)
, (11)
 , (12)
, (12)
Из уравнения (11) видно, что при регулировании по возмущению можно обеспечить абсолютно жёсткие механические характеристики (SСАУ = 0), если настроить регулятор и обратную связь так, чтобы
Kос × Кр = 1. (13)
При регулировании по отклонению получить нулевой статизм нельзя, как следует из уравнения (12), но можно сделать его меньше некоторой требуемой величины.
Согласно (8) статизм системы
 , где w0 получается из (12) при Мст
= 0, а ошибка Dw равна второму слагаемому
в (12)
, где w0 получается из (12) при Мст
= 0, а ошибка Dw равна второму слагаемому
в (12)
Следовательно
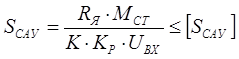
где [SСАУ] ¾ величина заданного статизма.
Отсюда для номинального режима получим, что
 . (14)
. (14)
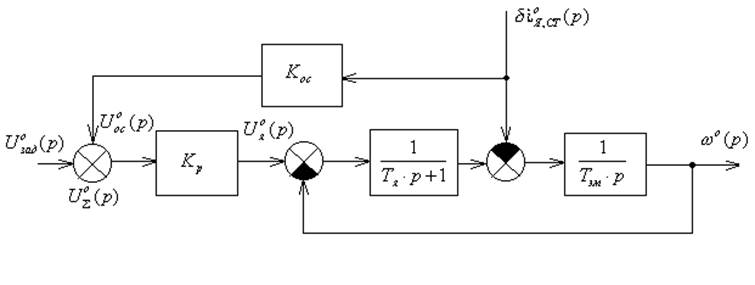
а)
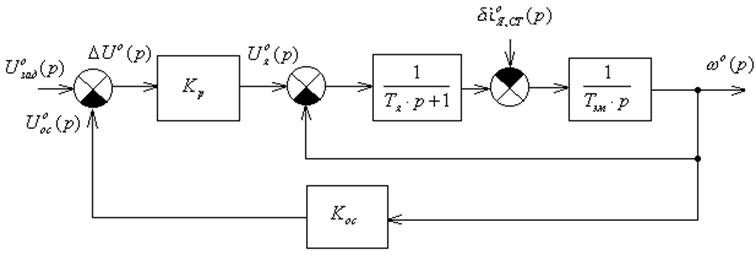
б)
Рис. 4 Структурная схема САУ скоростью ДПТ НВ с регулированием по возмущению (а) и по отклонению (б)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.