Министерство образования Республики Беларусь
Учреждение образования «Гомельский государственный технический университет им. П. О. Сухого»
Кафедра «Автоматизированный электропривод»
,
ХАРАКТЕРИСТИКИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯМИ
ПРАКТИЧЕСКОЕ РУКОВОДСТВО
к лабораторным работам по курсу
«Теория автоматического управления» для студентов спец. 53.01.05
«Автоматизированные электроприводы»
Часть 4
Гомель 2004
УДК 621.3.078.001
Настоящее практическое пособие содержит краткие теоретические сведения, задания на расчет и программы лабораторных работ по основным разделам теории автоматического управления для студентов специальности 53.01.05 – «Автоматизированные электроприводы», изучаемым в 6 семестре.
Рецензент – зав. каф. «Промышленная электроника», к.т.н., доцент
ВВЕДЕНИЕ
По учебному плану специальности 53.01.05 – «Автоматизированные электроприводы» дисциплина «Теория автоматического управления» читается в 5 и 6 семестрах и в каждом из них сопровождается лабораторными работами.
Данное пособие содержит лабораторные работы по тем разделам, которые изучаются в 6-м семестре. Это работы, посвященные расчету и исследованию статических и динамических характеристик систем автоматического управления электродвигателями.
С целью индивидуализации процесса обучения, лабораторные работы выполняются фронтальным методом бригадами по
2-3 студента по персональному расчетному заданию для каждого студента.
Поскольку в одной лабораторной работе экспериментально проверяется расчет одного из членов бригады, то разрешается оформлять общий отчет по работе на бригаду с одной экспериментальной проверкой, но с представлением расчетов всех членов бригады.
Отчет по лабораторной работе должен содержать: цель работы, результаты расчетов, схемы эксперимента, расчетные и экспериментальные графические зависимости, выводы в виде ответов на контрольные вопросы.
Рабочее место при проведении лабораторных работ состоит из генератора, лабораторного стенда и двухлучевого осциллографа, аналогичных используемым в 5 семестре.
Исследование статических свойств системы автоматического управления скоростью
электродвигателя постоянного тока
независимого возбуждения
Статические характеристики и статизм
разомкнутой системы управления
электродвигателем постоянного тока
независимого возбуждения
Цель работы
Изучить принципы построения электронной модели ДПТ НВ и разомкнутой САУ управления им. Аналитически и экспериментально исследовать влияние на вид их статических характеристик и величину статизма параметров электродвигателя и системы управления.
Краткие теоретические сведения
1.1.1.Операторная модель ДПТ НВ
При постоянстве магнитного потока возбуждения и управлении скоростью за счёт регулирования якорного напряжения математическая модель электродвигателя постоянного тока в виде системы дифференциальных уравнений имеет вид [1.2]
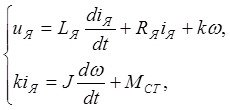 (1)
(1)
где ![]() - напряжение, ток, активное
сопротивление и индуктивность якорной обмотки;
- напряжение, ток, активное
сопротивление и индуктивность якорной обмотки; ![]() -
угловая скорость якоря;
-
угловая скорость якоря; 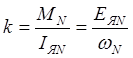 –
конструктивная константа ДПТ НВ;
–
конструктивная константа ДПТ НВ; ![]() – момент
инерции вращающихся частей;
– момент
инерции вращающихся частей; ![]() - статический
момент сопротивления на валу двигателя.
- статический
момент сопротивления на валу двигателя.
Переходя к изображению по Лапласу и преобразовывая, представим (1) в операторной форме
![]()
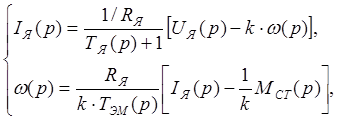 (2)
(2)
где  - постоянная
времени якорной обмотки;
- постоянная
времени якорной обмотки; 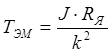 -
электромеханическая постоянная времени.
-
электромеханическая постоянная времени.
Операторную матмодель (2) в относительных переменных
![]()
где ![]() -
номинальные значения тока, ЭДС, скорости вращения якоря и момента двигателя,
можно записать так
-
номинальные значения тока, ЭДС, скорости вращения якоря и момента двигателя,
можно записать так
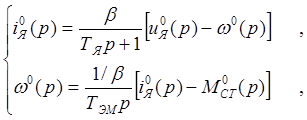 (3)
(3)
где  -
относительный коэффициент передачи электродвигателя по току якоря.
-
относительный коэффициент передачи электродвигателя по току якоря.
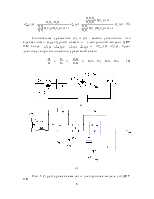
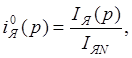
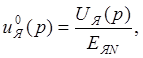
Операторную матмодель (3) можно изобразить в виде структурной схемы, представленной на рис. 1а, если ввести новые переменные:
 - относительное падение
напряжения на активном сопротивлении якорной обмотки от полного тока якоря;
- относительное падение
напряжения на активном сопротивлении якорной обмотки от полного тока якоря;
 - относительное падение
напряжения на активном сопротивлении якорной обмотки от статической
составляющей тока якоря.
- относительное падение
напряжения на активном сопротивлении якорной обмотки от статической
составляющей тока якоря.
Из структурной схемы электродвигателя следует, что
![]() (4)
(4)
где  - передаточные функции
по управлению (якорное напряжение) и по возмущению (статический момент
нагрузки).
- передаточные функции
по управлению (якорное напряжение) и по возмущению (статический момент
нагрузки).
1.1.2.Электронная модель ДПТ НВ
Из структурной схемы видно, что якорная обмотка является апериодическим звеном, а электромеханическая часть двигателя – интегрирующим звеном.
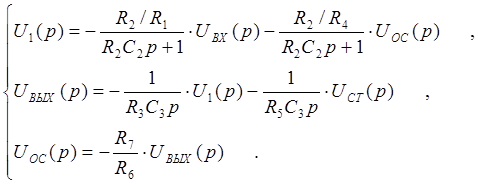
По электронным схемам типовых динамических звеньев можно построить электронную модель ДПТ НВ, соответствующую структурной схеме (рис. 1а) в виде, изображённом на рис. 1б.
Напряжения ![]() соответствуют переменным
соответствуют переменным ![]() .
.![]()
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.