n-приведенный коэффициента вязких сопротивлений упругой системы;
 м/с; [1,стр. 90]
м/с; [1,стр. 90]
p-собственная частота колебаний вибромашины ;
 с-1 [1,стр.90]
с-1 [1,стр.90]
где ![]() – коэффициент жесткости
сопротивления упругой системы. Найдем его из уравнения для определения
возмущающей силы:
– коэффициент жесткости
сопротивления упругой системы. Найдем его из уравнения для определения
возмущающей силы:
![]()
при t = 27c и выбрав F = 20000H из таблицы для самобалансного вибратора [т. 1, стр. 107].
20000 = ![]() 0,04 sin(52*27) + 200*0.04*52 cos(52*27);
0,04 sin(52*27) + 200*0.04*52 cos(52*27);
![]() = 619896.
= 619896.
Так под действием
возмущающей силы вибратора центр тяжести массы M колебательной системе смещается на
величину x, получая ускорения ![]() ,то на возбужденную колебательную
систему будет действовать возмущающая сила
,то на возбужденную колебательную
систему будет действовать возмущающая сила
![]() [1,стр. 91].
[1,стр. 91].
Давление на подшипники вибратора в установившемся режиме
 . [1,стр. 92]
. [1,стр. 92]
Возмущающую силу привода в установившемся режиме колебаний системы определим, продифференцировав дважды и подставив полученное ускорение колебаний системы в выражение:
![]() , [1,стр. 92]
, [1,стр. 92]
где амплитудное значение возмущающей силы [1,стр.92]
и угла сдвига фаз между смещением дебалансов вибратора и возмущающей силой
Давление на подшипники вибратора в установившемся режиме определим, подставив значение Aи jв формулу:
 .[1,стр. 93]
.[1,стр. 93]
Работа, совершаемая возмущающей силой за цикл колебаний и идущая на воспаление потерь энергии в упругих связях, будет
 .[1,стр. 93]
.[1,стр. 93]
Подставив в это выражение значение P, получим
 .[1,стр. 93]
.[1,стр. 93]
Работа, затрачиваемая за один оборот на преодоление сил трения в подшипниках вибратора, будет
 .[1,стр. 94]
.[1,стр. 94]
Подставив в это выражение значение Fn(t) и произведя интегрирование, получим
 s - соотношение диаметра вала и эксцентриситета
вращающихся частей вибратора;
s - соотношение диаметра вала и эксцентриситета
вращающихся частей вибратора;
 .[1,стр. 95]
.[1,стр. 95]
Энергия, затрачиваемая в упругих связях и подшипниках вибратора, будет [1,стр. 95]
2.3. Выбор электродвигателя.
Требуемую мощность электродвигателя РТР находят с учетом потерь, возникающих в приводе:

где:
Рвых – мощность на ведомом валу привода (кВт),
hо – коэффициент полезного действия привода.
К.п.д. привода равен
h0 = h1 • h22 • h3,
где h1= 0,95 - к.п.д. цилиндрической зубчатой передачи;
h2= 0,995 - коэффициент, учитывающий потери в одной паре подшипников;
h3= 0,96 - к.п.д. клиноременной передачи;
Значения h1 ... h3приняты по рекомендациям [3].
Тогда к.п.д. привода равен
h о = 0,95 • 0,9952 • 0,96 = 0,903.
Выходная мощность составляет:
![]()
 кВт
кВт
По табл. 24.9. [4] выбираем электродвигатель с мощностью Рдв ³ Ртр и асинхронной частотой вращения двигателя nдв:
Техническая характеристика двигателя:
Марка электродвигателя …………………..… АИР160M6
Мощность, кВт ……………………………..… 15
Частота вращения, мин![]() ……………….......... 970
……………….......... 970
Масса двигателя, кг ………………………….. 33,9
Перегрузка привода составляет:
 Что допустимо.
Что допустимо.
2.4 Кинематический расчет изделия.
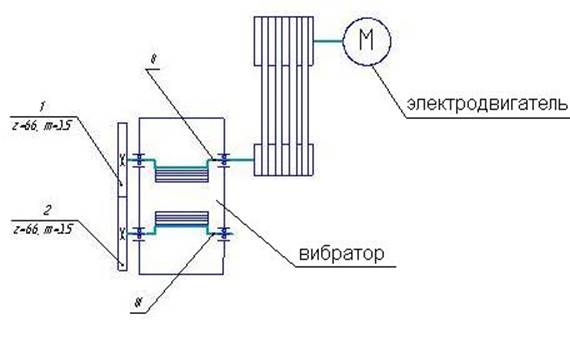
Рис. 8. Кинематическая схема вибрационного питателя.
2.4.1. Расчет клиноременной передачи.
Определим передаточное отношение [6]:
 .
(2. стр 68.) где
.
(2. стр 68.) где ![]() – частота вращения вала
вибратора.
– частота вращения вала
вибратора.
![]() =
=![]() / (2 · ¶)· 60 = 52 / (2
· 3,14) · 60 = 497 об/мин.
/ (2 · ¶)· 60 = 52 / (2
· 3,14) · 60 = 497 об/мин.
Найдем диаметр шкива на электродвигателе [6]:
 , (2.
стр 69.)
, (2.
стр 69.)
где ![]() - диаметр шкива на валу
виратора.
- диаметр шкива на валу
виратора.
Фактическое передаточное число [6]:
 . (2. стр
70.)
. (2. стр
70.)
Минимальное межосевое расстояние[6]:
![]()
![]() , (2. стр 71.)
, (2. стр 71.)
где ![]() -высота ремня. Тип
сечения ремня – В.
-высота ремня. Тип
сечения ремня – В.
Расчетная длина ремня [6]:
 (2. стр 72.)
(2. стр 72.)
Действительная
длина ремня ![]() .
.
Уточняем межосевое расстояние [6]:
![]() . (2. стр
73.)
. (2. стр
73.)
Угол обхвата ремнем меньшего шкива [6]:
![]() . (2. стр 74.)
. (2. стр 74.)
Скорость ремня[6]:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.