В положении равновесия сумма всех сил на ось ОХ должна быть равна нулю
![]()
В свою очередь силу трения можно представить в виде
![]()
Консольность вылета подвижной части можно компенсировать введя поправочный коэффициент, равный 2 тогда результирующая сила F будет равна
![]()
Учитывая время разгона до максимальной скорости, можно найти значение ускорения
![]()
Отсюда можно найти силу инерции, возникающую при перемещении подвижной части
![]()
Далее находим силу, которую необходимо приложить к дорожке, что бы заставить её двигаться в наихудших условиях (максимальный вес бегуна, максимальный угол наклона дорожки)
![]()
Зная это значение можно легко найти значение необходимой мощности двигателя
![]()
Учитывая, что КПД подшипника составляет 0,94 и винтовой передачи 0,5 значение мощности возрастёт до 0,42 Вт. Если ещё учесть коэффициент запаса, равный 2,5 , получим, что значение мощности возросло до 1 Вт.
Анализируя полученные значения, назначим двигатель. Пользуясь табличными данными ([1] с.420 ), выбираем двигатель ДБУ-1-10,5 со встроенным редуктором (Р=1Вт; n=248мин-1, передаточное число редуктора 10,5).
Определим силы, действующие на подшипники при нагрузке и построим схему нагружения вала.
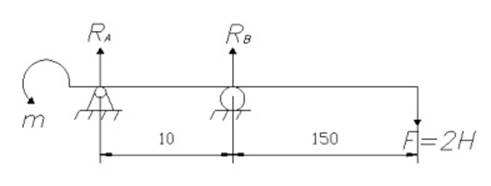
Рисунок 5.2 – Схема нагружения подшипников
Согласно положениям теоретической механики сумма моментов относительно одной из опор должна быть равна нулю.
m – Момент, возникающий в следствии передачи вращения от двигателя через полумуфты
RА,RВ – реакции опор.
F – сила, действующая при полном вылете консоли.
Выбираем шариковый радиально-упорный подшипник 6008 . Для него характерны следующие параметры: ([3] с.126)
d - диаметр внутреннего кольца = 8 мм
D - диаметр наружного кольца = 24мм
B – ширина колец = 7 мм
C – динамическая грузоподъёмность = 3840 Н
C0 – статическая грузоподъёмность = 1630Н
По таблицам ([2] с.104) находим значение X = 0,44, Y = 1,47 и e = 0.38
Вычислим эквивалентную динамическую нагрузку
![]()
Кб – коэффициент безопасности
КТ – температурный коэффициент
![]()
Расчётный ресурс подшипника определяется по формуле
а1 – коэффициент долговечности а23 – коэффициент, характеризующий совместное влияние на долговечность особых свойств металла деталей подшипника и условий его эксплуатации.

Исходя из вышеизложенного можно сказать, что подшипники выбраны правильно.
Для обеспечения надёжности работы механизма выбираем установки подшипников враспор. Необходимую жёсткость опоры будет обеспечивать схема расположения подшипников на валу. ([2] с. 48)
Основной причиной заклинивания направляющей в данной конструкции будет являться изгиб консольной части вала при наибольшем вылете подвижной части.
Для упрощения расчёта представим консольную часть вала жёстко вделанной в опору.
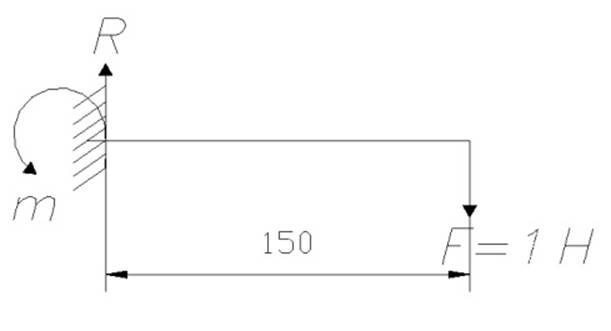
Рисунок 5.3 – Схема нагружения консоли
Диаметр консоли составляет 12 мм., материал – Сталь 40ХЕ, консольность – 105 мм, модуль Юнга Е=2·105 Мпа, σв=1000МПа, σт=800Мпа.
Зная, что эквивалентный момент сопротивления с одной стороны: отношение эквивалентного момента инерции к максимальной координате сечения
 , а с другой отношение момента
действующей силы к допустимому напряжению
, а с другой отношение момента
действующей силы к допустимому напряжению
 , можно получить формулу для расчёта
эквивалентного момента инерции:
, можно получить формулу для расчёта
эквивалентного момента инерции:

Наибольший прогиб свободного конца консоли рассчитывается по формуле:
Если учесть, что напряжения, возникающие в материале под действием нагрузки
 , то формула принимает вид
, то формула принимает вид

таким образом максимальный прогиб под действием нагрузки 3,5·10-4 мкм. Если учитывать возможные огрехи и ввести коэффициент запаса, то значение прогиба возрастёт до 7·10-4 мкм.
Направляющая сопрягается с корпусом по размеру Æ 30H8/f8.
Нижнее предельное отклонение размера Æ 30H8 равняется 0, а верхнее предельное отклонение размеров Æ 30 f8 равняется -30 мкм.
Нетрудно подсчитать, что минимальный зазор при выбранной посадке составляет 30 мкм, что значительно превышает подсчитанный максимальный прогиб консоли, равный 7·10-4 мкм. Иными словами можно констатировать, что направляющая будет свободно без заклинивания перемещаться в корпусе.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.