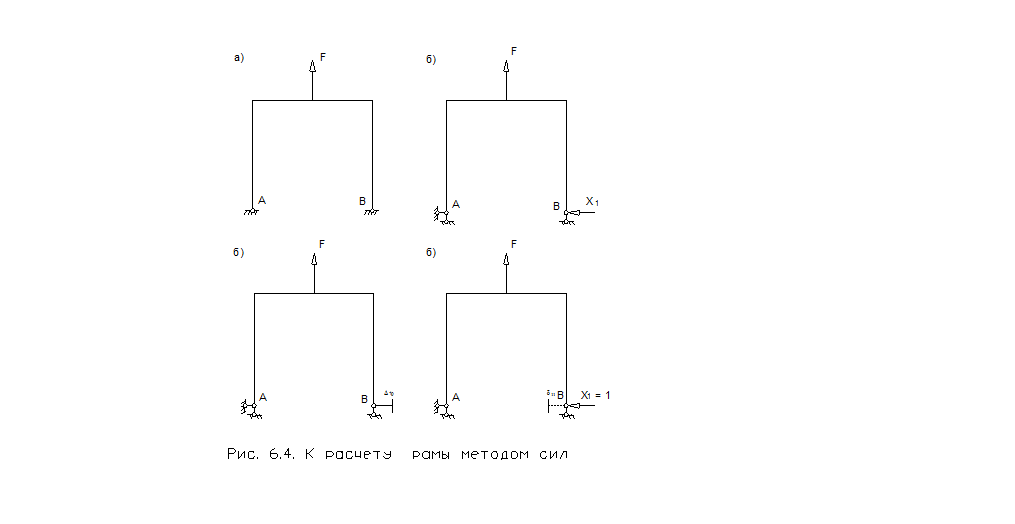
Один раз статически неопределимая система показана на рис. 6.4, а. За основную систему можно принять раму с устраненной горизонтальной связью, вместо которой приложена лишняя неизвестная X1 (рис. 6.4, б).
При действии лишь внешней нагрузки, правая опора получит перемещение D1р (рис. 6.4, в). По условиям закрепления заданной системы перемещение отсутствует, поэтому искомое усилие должно возвратить точку в исходное положение. Т.к. значение X1 неизвестно, то прикладываем усилие X1 = 1, которое вызовет перемещение d11 (рис. 6.4, г). При действии силы X1 в линейно-деформируемой системе перемещение равно d11X1, тогда условие, выражающее отсутствие перемещения по направлению отброшенной связи, представится так:
d11X1 + D1р =0 (6.2) откуда
X1 = - D1р/d11 , (6.3)
где D1P - перемещение от внешних сил в направлении действия единичной силы (единичная сила прикладывается в точке приложения неизвестного усилия Х1 и совпадает с ним по направлению);
d11 - перемещение от единичной силы в направлении действия единичной силы (X1 = 1).
После построения эпюр изгибающих моментов от внешней и единичной нагрузок перемещения могут быть найдены по формуле Максвелла-Мора:
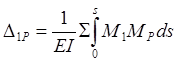 , (6.4)
, (6.4)
![]()
![]()
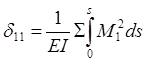 ,
(6.5)
,
(6.5)
где МР и М1 – значения изгибающих моментов в расчетном сечении соответственно от внешней нагрузки и единичной силы;
s - координата рассматриваемого сечения.
Для вычисления интегралов применяется способ Верещагина, заключающийся в “перемножении” эпюр моментов от действия заданной (МР) и единичной (М1) нагрузок (подробнее см. [3], [5], [10]). В целях упрощения расчетов можно использовать расчетные формулы, приведенные в табл. 6.1, если эпюр моментов от действия заданной внешней нагрузки (МР) имеет линейный характер (или близкий к линейному).
Таблица 6.1 - Формулы для расчета интегралов
|
Эпюра М |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
После определения величины Х1 строят эпюру моментов от её действия, перемножая величину момента от единичной нагрузки на величину Х1.
Уравнений типа (6.2) и (6.3) можно составить столько сколько лишних неизвестных в заданной системе.
6.1.2.2. Из-за больших математических трудностей расчета систем с большим количеством лишних связей (особенно с элементами в виде пластин и оболочек) получили широкое развитие численные методы расчета, среди которых наиболее универсальным является метод конечных элементов, применяемый в основном в виде метода перемещений с использованием ЭВМ.
Согласно этому методу, система разбивается на отдельные части – “конечные элементы”, для которых составляются уравнения, описывающие их совместную работу. В стержневых системах конечным элементом является стержень.
В СГУПС имеются профессиональные программы для расчета стержневых систем, плит, оболочек и массивных тел. Расчет стержневых систем может быть выполнен по программам МКЭСС (авт. Е.В. Васильев, НИИЖТ); INTAB и TB–FEM (коллектив авторов под руководством Н.Н. Шапошникова, МИИТ). Программа INTAB работает только с плоскими системами.
Для работы программ необходима информация о геометрии конструкции, нагрузке, материале. Правила внесения исходных данных в программу см. [10].
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 при
эпюре Мр, имеющей вид
при
эпюре Мр, имеющей вид