![]() Так как , то . Тогда схему рис. 41 можно преобра-
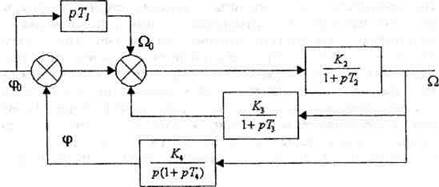
Так как , то . Тогда схему рис. 41 можно преобра-
|
|
|
Рис. 42 |
зовать, оставив лишь один источник опорного сигнала (рис. 42).
На рис. 43: U0- напряжение питания двигателя; М - момент на валу двигателя.
![]() Изменение (нестабильность) этих параметров
может быть причиной появления ошибки регулирования. Дестабилизирующие факторы DU0 и DM0 обозначим как возмущающее воздействие F,
приложенное ко входу
звена
Изменение (нестабильность) этих параметров
может быть причиной появления ошибки регулирования. Дестабилизирующие факторы DU0 и DM0 обозначим как возмущающее воздействие F,
приложенное ко входу
звена
. Запишем некоторые очевидные соотношения для рис. 43 и произведем необходимые преобразования.
Для краткости записи обозначим:
х - входное воздействие,
у - результат регулирования,
x - частотная ошибка регулирования (см. рис. 43)
![]() Тогда:
Тогда:
Подставляя передаточные функции звеньев и учитывая, что ошибка получаем после преобразований:
![]()
51
Наличие индекса р в числителе как при входном воздействии x, так и при возмущающем воздействии Fговорит о том, что регулирование по частоте астатическое, т.е. наличие нестабильности М и U0в статике не дает ошибки по частоте (скорости двигателя), а дает лишь ошибку по фазе (выход левого сумматора).
6.4. СИСТЕМА СТАБИЛИЗАЦИИ НАТЯЖЕНИЯ МАГНИТНОЙ ЛЕНТЫ
По принципу устройства все системы стабилизации натяжения делятся:
- на системы с регулированием по возмущению;
- системы с регулированием по отклонению.
Функциональная схема системы с регулированием по возмущению показана на рис. 44. Она отличается отсутствием обратной связи. В основу регулирования положено то обстоятельство, что с изменением радиуса намотки ленты на катушке для сохранения усилия, приложенного со стороны подающего узла, напряжение питания подтормаживающего двигателя необходимо менять. Действительно, для сохранения неизменного усилия, приложенного к ленте, например при увеличении радиуса намотки, вращающий момент двигателя надо увеличивать. Это значит, необходимо увеличивать напряжение на клеммах двигателя.
Тахогенераторы формируют гармонические сигналы с частотой, пропорциональной частоте вращения двигателей. Усилитель-ограничитель преобразует гармонический сигнал в прямоугольный, так как частоты, генерируемые тахогенератором, очень низкие и на таких частотах большинство известных частотных детекторов работает с прямоугольными сигналами.
Устройство работает следующим образом: чем быстрее вращается Д2, тем медленнее вращается Д1 а это значит, что увеличение частоты W2 преобразуется в большее напряжение U1и момент на валу двигателя Д1 будет возрастать, что и требуется. Недостатком системы рис. 44 является отсутствие обратной связи. Как всякая система без обратной связи, она не сможет отрабатывать возможные возмущающие воздействия, такие, как нестабильность питающих напряжений, трение в катушечных накопителях, нелинейность характеристик элементов схемы и т.п.
Более совершенной системой стабилизации напряжения магнитного носителя является система с обратной связью. В такой системе необходимо контролировать фактическое усилие натяжения ленты и в случае его изменения по каналу обратной связи вырабатывать воздействие на двигатель, направленное на уменьшение ошибки регулирования по натяжению. Функциональная схема системы стабилизации натяжения ленты построенной по принципу регулирования по отклонению, показанной на рис. 45.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.