2) система стабилизации натяжения магнитного носителя (ССН).
6,3. СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ МАГНИТНОЙ ЛЕНТЫ (САРС)
Подобные системы строятся по классической схеме систем стабилизации. При этом задающим воздействием является высокостабильный по частоте периодический сигнал. Информация о фактической скорости движения магнитного носителя может быть получена двумя способами. Первый способ - измерение частоты вращения вала двигателя, осуществляющего протяжку ленты. Это не очень точный способ, так как стабильность частоты вращения двигателя лишь приблизительно отражает стабильность скорости движения ленты. Это связано с тем, что между лентой и валом двигателя не исключаются хотя бы незначительные пробуксовки, несмотря на наличие прижимного резинового ролика. Тем не менее, для аудиомагнитофонов даже высокого класса такой способ измерения скорости движения ленты вполне приемлем, ибо небольшие (сотые доли процента) детонации при прослушивании аудиозаписи неощутимы на слух. В более точных аппаратах, например устройствах видеозаписи, такой способ совершенно неприемлем, так как точность захода траектории магнитной головки на наклонную магнитную дорожку записи должна составлять десятки микрон при протяжке через ЛПМ сотен метров ленты. В этом случае необходимо измерять фактическую скорость движения ленты, для чего на специальную магнитную дорожку, расположенную по краю ленты, при записи наносится синхронизирующий сигнал от высокостабильного генератора. Частота этого сигнала в процессе воспроизведения пропорциональна скорости движения ленты.
На рис. 38 показан вариант функциональной схемы статической системы стабилизации скорости вращения тягового двигателя ЛПМ магнитофона.
Объектом регулирования является двигатель Д, на который поступают напряжение питания U2и возмущающее воздействие М, которое представляет собой реакцию нагрузки на вал двигателя. Тахогенератор ТГ находится на одном валу с двигателем и вырабатывает гармонический сигнал, частота которого пропорциональна скорости вращения тахогенератора, а следовательно,
и двигателя. Сигнал с тахогенератора подается на частотный детектор ЧД, где частота со сравнивается с эталонной 0. Сигнал ошибки , с выхода частотного детектора усиливается усилителем У и, суммируясь с напряжением питания двигателя U0, поступает на клеммы двигателя. Таким образом, замыкается обратная связь.
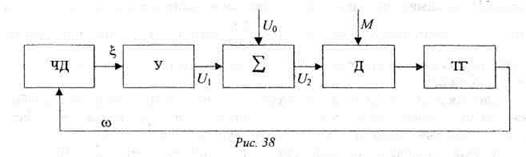
Обратная связь в системе должна быть отрицательная, чтобы система была устойчива и подавляла нестабильность питающего напряжения (Уо и момента нагрузки М. Для этого полярность включения частотного детектора и усилителя выбираются так, чтобы уменьшение скорости вращения двигателя приводило к увеличению напряжения U1 в результате чего двигатель смог бы увеличить обороты.
|
-сумматор и инерционное звено |
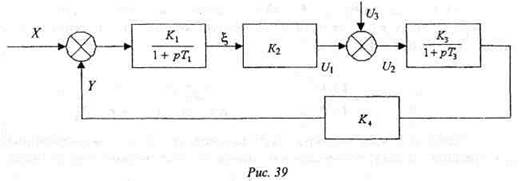
![]() Структурная схема системы показана на рис. 39,
где представлены следующие структурные единицы:
Структурная схема системы показана на рис. 39,
где представлены следующие структурные единицы:
описывают частотный детектор;
.
![]() -усилитель сигнала ошибки К2; -
возмущающее воздействие U3,
пересчитанное к входу двигателя;
-усилитель сигнала ошибки К2; -
возмущающее воздействие U3,
пересчитанное к входу двигателя;
|
|
- двигатель
-тахогенератор К4.
46
47
|
На главный сумматор системы поступает для сравнения сигнал X(требуемая скорость вращения двигателя) и сигнал У (фактическая скорость вра
щения двигателя). Инерционность вызвана наличием ФНЧ в структуре частотного детектора. После усиления сигнала ошибки в усилителе К2 напряжение U1складывается с дестабилизирующим воздействием U3 и поступает на
![]() двигатель. Инерционность двигателя
вызвана в основном механической инерционностью ротора двигателя и ротора
тахогенератора, находящихся на одном валу.
двигатель. Инерционность двигателя
вызвана в основном механической инерционностью ротора двигателя и ротора
тахогенератора, находящихся на одном валу.
Данная система является статической, т.е. не может работать без ошибки как по управляющему воздействию х, так и по возмущающему воздействию U3. Действительно, запишем соответствующие передаточные функции:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.