Передаточная функция по ошибке от регулирующего воздействия
|
|
![]()
Где
Здесь К - коэффициент усиления разомкнутой системы по постоянному току (в статике) Отсюда:
Как известно из теории автоматического управления, наличие в числителе этого выражения свободного слагаемого 1 говорит о том, что система статическая. В установившемся режиме такая система дает ошибку регулирования по управляющему воздействию:
Это значит, что, например, при К = 99 ошибка составит один процент.
Передаточная функция ошибки по возмущающему воздействию записывается следующим образом:
Свободный член числителя К3К4 показывает, что и по возмущающему воздействию система статическая и в установившемся режиме ошибка будет:
![]()
При К >> 1 и, учитывая,
что К= К1К2К3К4 получаем:
Следовательно, если к двигателю прикладывается тормозящий момент, эквивалентный приложению дополнительного напряжения U3, то ошибка по скорости будет такая, которая соответствует приложению к двигателю напряU3 жения ———.
K1K2
Таким образом, качество работы статической системы стабилизации скорости протяжки магнитной ленты не может быть сделано очень высоким. Для устройств точной магнитной записи необходимо использовать астатические системы стабилизации скорости.
Астатическая САРС
|
Рис. 40 |
Функциональная схема одного из вариантов астатической системы стабилизации скорости магнитного носителя показана на рис. 40.
![]()
Сравнивая рис. 38 и 40, можно заметить,
что у них много общего. Фактически в схеме рис.40 добавился еще один контур
регулирования, замыкающийся через фазовый детектор ФД. Опорным сигналом для ФД
является сигнал с высокостабильного генератора fonпроходящий через
делитель частоты ДЧ. Необходимость деления частоты fопвызвана тем, что частота, вырабатываемая
тахогенератором ТГ, сравнительно низкая, в то время как высокостабильный
генератор, как правило, кварцованный, работает на высоких частотах.
Наличие второго контура регулирования позволяет повысить точность регулирования системы. В частности, можно свести точность слежения до постоянной фазы, что автоматически убирает ошибку по частоте. В этом случае ошибка регулирования на левом входе сумматора будет. Именно она и формирует управляющее воздействие. В то же время сигнал на нижнем входе сумматора может отсутствовать, так как частота будет точно равна требуемой. Ошибка по фазе будет, а ошибки по частоте не будет. Разумеется, это касается статики или очень медленного изменения U0и F.
48
49
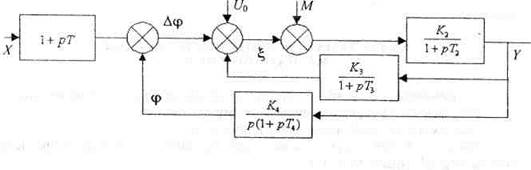
Структурная схема двухконтурной астатической системы стабилизации скорости ленты представлена на рис. 41.
Перенося точку приложения W0 на вход левого сумматора, получаем окончательно структурную схему (рис. 43).
|
|
Рис. 43 |
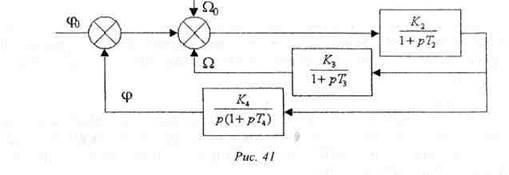
Левый сумматор относится к фазовому детектору и определяет разницу между текущей фазой j напряжения тахогенератора и фазой j0 опорного сигнала.
Второй сумматор определяет разность частот Wтахогенератора и опорной частоты W0 которая требуется для идеального качества регулирования. Фактически частота W0 на частотный детектор не подается, она туда вводится
![]() при настройке частотного детектора. Инерционные
звенья относятся к двигателю с усилителем и частотному
детектору соответственно.
при настройке частотного детектора. Инерционные
звенья относятся к двигателю с усилителем и частотному
детектору соответственно.
Звено относится к фазовому детектору. Инерционность вызвана
![]() наличием постоянной времени T4 RС-цепи на выходе фазового детектора, а наличие
индекса p в знаменателе отражает интегрирующие свойства фазового
детектора по частоте:. Это, в частности, означает, что при постоянной
расстройке частот W и W0 фаза между ними будет линейно расти, а это и
есть интегрирование.
наличием постоянной времени T4 RС-цепи на выходе фазового детектора, а наличие
индекса p в знаменателе отражает интегрирующие свойства фазового
детектора по частоте:. Это, в частности, означает, что при постоянной
расстройке частот W и W0 фаза между ними будет линейно расти, а это и
есть интегрирование.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.