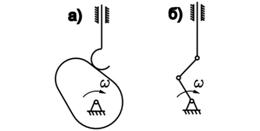
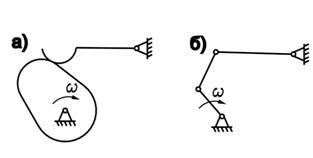
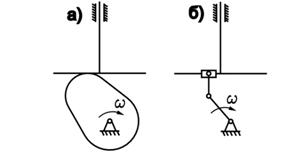
В плоском механизме структурная эквивалентность соблюдается, если одна высшая пара заменяется одним дополнительным звеном, входящим в две дополнительные низшие пары со звеньями, образующими высшую пару. Для обеспечения кинематической эквивалентности необходимо, дополнительные низшие вращательные кинематические пары располагать в центрах кривизны звеньев, образующих высшую пару.
Примеры заменяющих механизмов представлены на рис. 1.8.
![]()
1.6. Порядок структурного анализа.
Цель структурного анализа: убедиться в определенности движения звеньев (работоспособности) механизма и выявить строение механизма и порядок его создания (синтеза).
Работоспособность механизма в смысле определенности движения звеньев характеризуется следующими показателями:
1. W механизма должно быть равно числу начальных звеньев.
2. В составе механизма не должно быть звеньев, не входящих в группы Ассура или механизм 1-ого класса.
Последовательность действий:
1. Построить кинематическую схему механизма.
2. Подсчитать число звеньев и кинематических пар. Определить W механизма.
3. Выявить пассивные связи и лишние степени свободы. Устранить их. Повторно определить W.
4. Заменить высшие пары кинематическими цепями, содержащими низшие пары. Проверить W.
5. Расчленить механизм на группы Ассура, руководствуясь следующими правилами:
5.1. Первой отделяется группа, наиболее отдаленная от начального звена (WГР=0).
5.2. Вначале следует попытаться отыскать группу второго класса, если это невозможно, то третьего и т.д.
5.3. После отсоединения группы следует проверить, не изменилась ли кинематика, а так же степень подвижности оставшейся части механизма. Каждая кинематическая пара принимается в расчет только один раз: либо с отсоединенной группой, либо с оставшейся частью механизма.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.