Ниже будут продемонстрированы алгоритмы расчетов, разработанных для отдельных групп Ассура используемых при кинематическом и силовом анализе механизмов.
Пассивные связи. Иногда при
разработке конструкций механизма в схему для увеличения его жесткости или
устранения неопределенности движения звеньев в некоторых положениях в
кинематическую схему включают дополнительные звенья, которые фактически не
оказывают влияния на его кинематику. Например, на рис. 1.7 а представлен
сдвоенный параллелограмм, в схему которого введено дополнительное звено CD=AB
(ОА = BE, AC = CD). По формуле Чебышева имеем: ![]() .
.
В действительности W=1, т.к. дополнительное звено в силу особого выбора размеров звеньев (фигуры ACDB и ОАВЕ являются параллелограммами) не налагается новых связей. Такие звенья и кинематические, которые они образуют, называют пассивными условиями связи.
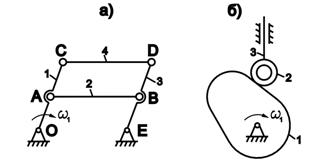
Лишние степени свободы. У
кулачкового механизма (рис. 1.7 б) по формуле Чебышева ![]() ,
хотя движение толкателя 3 полностью определяется движением кулачковой шайбы 1.
Лишняя степень свободы появилась из-за возможности произвольного вращения
ролика 2 вокруг своей оси. Она не влияет на кинематику толкателя. Введение в
конструкцию ролика обусловлено необходимостью уменьшить трение, а, следовательно,
и износ высшей кинематической пары.
,
хотя движение толкателя 3 полностью определяется движением кулачковой шайбы 1.
Лишняя степень свободы появилась из-за возможности произвольного вращения
ролика 2 вокруг своей оси. Она не влияет на кинематику толкателя. Введение в
конструкцию ролика обусловлено необходимостью уменьшить трение, а, следовательно,
и износ высшей кинематической пары.
При решении задач структурного, кинематического и точностного анализа механизмов с высшими парами, а также выявления в них степеней свободы используют прием условной замены высшей пары кинематической цепью с низшими парами. Механизм, полученный в результате замены, называют заменяющим.
Условием замены является структурная (степени свободы исходного и заменяющего механизмов одинаковы) и кинетическая (сохранение относительного движения звеньев, составляющих высшую пару) эквивалентность.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.