Министерство образования и науки РФ
Государственное образовательное учреждение
Санкт-Петербургский государственный университет
аэрокосмического приборостроения
Кафедра №32
Преподаватель:
Курсовой проект
по курсу:
«Проектирование электропривода»
Работу выполнил студент гр.3127:
Санкт-Петербург
2006г.
Техническое задание………………………………...…………………………………2
1. Анализ технического задания………………………………………………..3
2. Выбор исполнительного двигателя………………………………………….4
3. Расчет оптимального передаточного отношения редуктора………………6
4. Расчет основных параметров редуктора…………………………………….8
5. Построение аппроксимированной механической характеристики………10
6. Выбор измерителя рассогласования………………………………………..11
7. Статический расчет САР…………………………………………………....16
8. Анализ динамических свойств САР………………………………………..16
9. Синтез корректирующего звена…………………………………………….23
10. Вывод………………………………………………………………………..26
Список литературы……………………………………………………………..27
Техническое задание
Сведения о нагрузке:
1. Мн = 50 Н∙м - момент нагрузки;
2. Jн = 50 Н∙мс2 - момент инерции нагрузки;
3. αm = 2 рад - максимальный угол поворота;
4. Ωm = 2 c-1 - максимальная угловая скорость;
5. εm = 1 c-2 - наибольшее угловое ускорение;
Требования к качеству работы:
6. χст = 20 угл. мин. - допустимая статическая ошибка;
7. χск = 60 угл. мин. - допустимая скоростная ошибка;
8. М = 1,1 - показатель колебательности;
9. Род тока - любой.
1. Анализ технического задания.
Поскольку момент нагрузки в общем случае является суммой моментов имеющих различную физическую природу (шарнирный, вентиляторный, момент вязкого, сухого трения или момент неуравновешенности; кроме того, момент может быть как реактивным, так и активным) и имеет сложную зависимость от времени, рассмотрение каждой составляющей момента нагрузки в отдельности представляет собой сложную задачу, поэтому для дальнейшего рассмотрения выделяют один или несколько доминирующих моментов.
1. Рули высоты характеризуются шарнирным моментом Мн = kш·sinα, возникающим вследствие действия силы аэродинамического давления набегающего потока воздуха. Максимальный угол поворота ограничен -30º≤α ≤30º.
2. Антенным установкам и подвижным платформам соответствует больший момент инерции по сравнению с рулевыми системами. Возможны два режима работы:
а) Режим слежения за объектом;
б) Режим быстрой переориентации с одного объекта на другой;
3. Пропеллеры - это прежде всего крыльчатки насосов, вентиляторы, компрессоры. Соответствует вентиляторному моменту Мв = kвтр·ω2.
4. Устройства, работающие в вязкой среде. Это редукторы, заливаемые маслом, любые элементы кинематики, перемещаемые в жидкой среде. Возникает момент вязкого трения, который зависит от угловой скорости и среды Мвтр = kвтр·ω.
5. Элементы механики, характеризующиеся моментом сухого трения. Это подшипники, оси, валы, соединительные муфты (фрикционные). Возникает момент сухого трения Мстр = Мтр·signω. Момент – реактивный (знак зависит от направления вращения вала).
6. Подъемные механизмы. Возникает подъемный момент Мнпод = mg·r = const – активный, т.к. не зависит от направления вращения вала.
7.
Параметры объекта регулирования, приведенные в техническом задании, позволяют выявить некоторые технические и конструктивные особенности исполнительного органа:
- высокие момент инерции и момент нагрузки свидетельствуют о больших массогабаритных показателях регулируемого органа;
- большой угол поворота и относительно большая статическая ошибка не приемлемы для руля высоты;
- наложены ограничения на статическую и скоростную ошибки;
Принимая во внимание перечисленные позиции можно предположить, что объектом регулирования является антенна, следовательно, с большой долей вероятности можно считать наиболее ярко выраженными моментами нагрузки - момент неуравновешенности и динамический момент.
![]()
Данная антенна может работать либо в монотонном режиме при слежении за объектом, либо в переходном режиме – при смене объекта слежения.
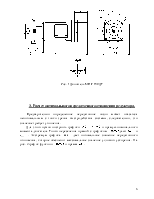
2. Выбор исполнительного двигателя.
Предварительный выбор исполнительного двигателя осуществляется по значению требуемой мощности.
![]()
Выбираем двигатель производим с учетом: ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.