После построения скорректированных характеристик, был проведен анализ системы на устойчивость. Для этого в подпрограмму Simulink была введена структурная схема, приведенная на рис. 18. График переходного процесса, приведенный на рис. 19
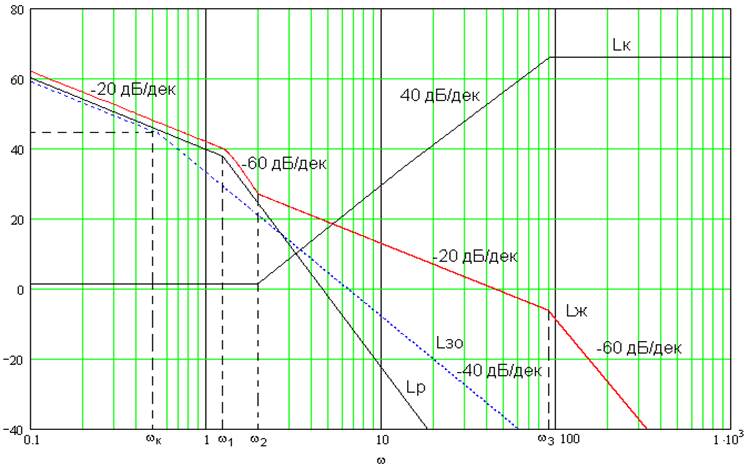
Рис. 16 Графики желаемой, располагаемой ЛАХ, а также запретная область и ЛАХ корректирующего звена.
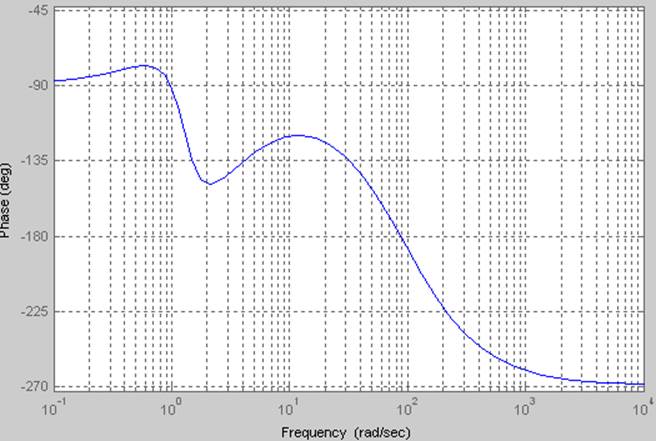
Рис. 17 Желаемая ЛФХ
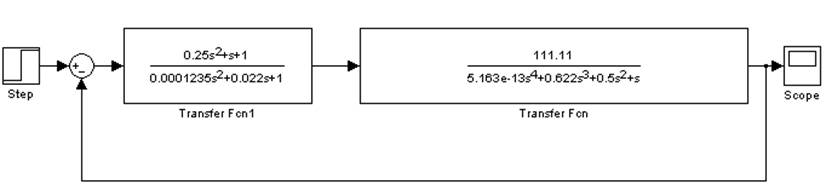
Рис. 18 Структурная схема скорректированной системы
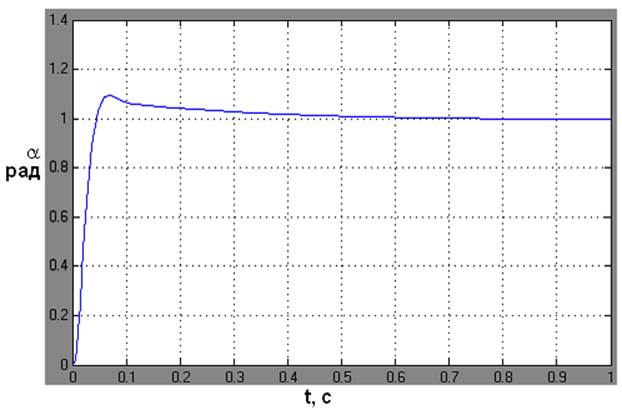
Рис. 19 График переходного процесса скорректированной системы.
Вид полученного переходного процесса скорректированной системы удовлетворяет требованиям ТЗ.
9.Синтез корректирующего звена.
Получим сначала передаточную функцию корректирующего звена, для чего поделим передаточную функцию желаемой системы на передаточную функцию располагаемой системы.

Все изломы ЛАХ коррекции вверх – звено стоит в числителе, если же ЛАХ коррекции загибается вниз – ставим звено в знаменатель:
Покажем реализацию корректирующего устройства с данной передаточной функцией.
Представим передаточную функцию звена коррекции в виде последовательного включения элементарных звеньев.
![]() , где
, где
 ;
;
Окончательно получаем принципиальную электрическую схему корректирующего устройства, показанную на рисунке 20, параметры элементов которой определяются решением системы уравнений:
Находим значения коэффициентов передачи корректирующего устройства:

Определяем значения постоянных времени:
 ;
;  ;
;  ;
;  ;
;
С учетом указанных соотношений получим:
![]() ;
;
![]() ;
;
Поскольку число уравнений меньше числа неизвестных то целесообразно задаться значениями емкостей конденсаторов С1, С2, С3 , С4 не превышающими 20мкФ, поскольку неполярные емкости большего номинала будут иметь существенные массогабаритные показатели, и определить номиналы резисторов. При расчетах следует учитывать, что получаемые номиналы резисторов должны лежать в диапазоне от 1 кОм до 1 Мом. Применение иных значений сопротивлений будет подчеркивать неидеальность характеристик операционного усилителя.
Принимаем С1 = 21мкФ; С2 = 0,5 мкФ; С3 = 21мкФ, С4 = 0,5мкФ тогда R1 = 24кОм; R2 = 22кОм, R3 = 22кОм; R4 = 24кОм , R5, R9 – добавочные сопротивления.
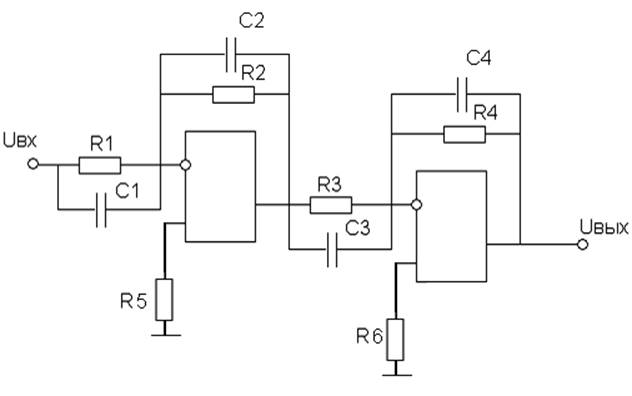
Рис. 20. Схема корректирующего звена Wk(p)
Для проверки правильности полученных значений резисторов вычисляем:
 ;
;
 ;
;
Эти значения соответствуют значениям Kk(0) и Kk(∞), определенным по ЛАХ корректирующего устройства.
10.Вывод: техническим заданием данного курсового проекта было предусмотрено проектирование следящей САР на основе электродвигателя любого рода тока с заданной мощностью. Исходя из соображений оптимального использования параметров двигателя и простоты его регулирования наилучшим образом подошел ДПТ МИГ 180ДТ.
Произведенный анализ ТЗ позволил определиться с объектом регулирования,- антенной. Далее были рассчитаны основные параметры редуктора и пересчитаны значения эквивалентного и результирующего моментов с поправкой на момент инерции редуктора. Новые значения результирующего и эквивалентного моментов не превысили величин пускового и номинального моментов соответственно, что говорит о удовлетворении необходимым и достаточным условиям выбора двигателя.
Был произведен динамический расчет системы и поскольку, оказалось, что система неустойчива, то был осуществлен синтез корректирующего звена на операционных усилителях с применением активных цепей коррекции соединенных последовательно.
Спроектированный электропривод удовлетворяет исходным требованиям ТЗ.
Список литературы:
1. Шишлаков В.Ф. “Проектирование электронных усилительных устройств систем автоматического управления” ГУАП 2005г.
2. Лекции по курсу “Проектирование электропривода”.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.