Выберем модуль зубчатых колес по формуле, где ![]() – коэффициент ширины зуба,
– коэффициент ширины зуба, ![]() – допустимое напряжение в стали зубчатых колес при
расчете на выносливость:
– допустимое напряжение в стали зубчатых колес при
расчете на выносливость:

Ближайшее по ГОСТу значение модуля 1мм. Проведем расчет диаметров зубчатых колес:
![]()
d1=20мм, d2=50мм,
d3=17мм, d4=68мм,
d5=17мм, d6=85мм,
d7=18мм, d8=108мм.
Вычислим
толщину каждого зубчатого колеса, где ![]() :
:
![]()
Вычислим теперь момент инерции редуктора, где ![]() – плотность
конструкционной стали Ст45:
– плотность
конструкционной стали Ст45:

Необходимо откорректировать ранее вычисленные выражения для моментов с поправкой на момент инерции редуктора :

Новые значения результирующего и эквивалентного моментов (с поправкой на момент инерции редуктора) удовлетворяют необходимым и достаточным условиям выбора двигателя. На рис. 5 приведена кинематическая схема редуктора.
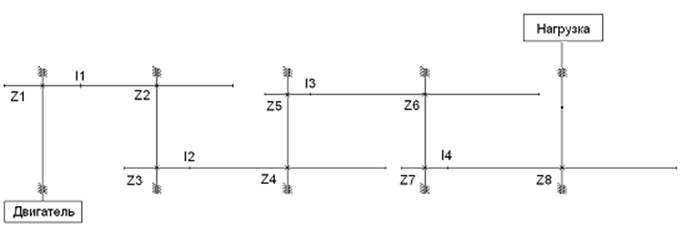
рис. 5 Кинематическая схема редуктора.
5. Построение аппроксимированной механической характеристики двигателя МИГ-180ДТ.
Для построения механической характеристики двигателя постоянного тока и правильной аппроксимации необходимо определить к какому классу по мощности относится данный двигатель. Для этого зададимся условием, что двигатели с пусковым током более 20А относятся к двигателям большой мощности.
Поскольку, номинальный ток управления равен ![]() , следовательно,
, следовательно, ![]() и двигательМИГ-180ДТотносится к серии двигателей большой мощности и значит, его предельная
механическая характеристика аппроксимируется тремя отрезками и имеет ограничивающий
срез в районе пускового момента, ввиду того, что в двигателях постоянного тока большой
мощности не допустим прямой пуск .
и двигательМИГ-180ДТотносится к серии двигателей большой мощности и значит, его предельная
механическая характеристика аппроксимируется тремя отрезками и имеет ограничивающий
срез в районе пускового момента, ввиду того, что в двигателях постоянного тока большой
мощности не допустим прямой пуск .
График
функции  представлен на рис.6,
где
представлен на рис.6,
где  жесткость механической
характеристики. Аппроксимирующий отрезок
жесткость механической
характеристики. Аппроксимирующий отрезок ![]() где
где ![]() коэффициент запаса, устанавливает
то предельное значение скорости, которое не может быть превышено в номинальном
режиме работы.
коэффициент запаса, устанавливает
то предельное значение скорости, которое не может быть превышено в номинальном
режиме работы.
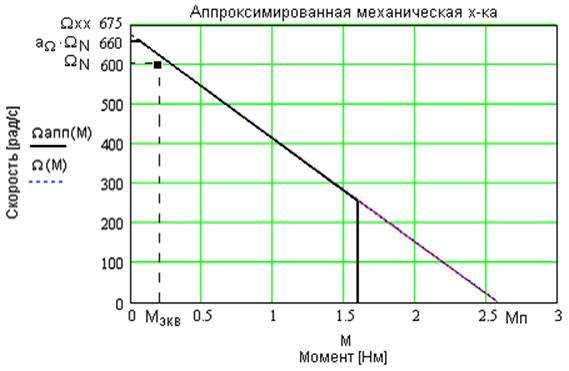
рис.6 Аппроксимированная механическая характеристика.
Координаты экстремума функции диаграммы нагрузки это эквивалентный момент и номинальная скорость вращения.
Аппроксимированная механическая характеристика двигателя МИГ-180ДТ охватывает точку максимума диаграммы нагрузки, - данное обстоятельство является критерием оценки удовлетворения требованиям нагрузки параметров и вида данной характеристики двигателя.
6. Выбор измерителя рассогласования.
Измерители рассогласования применяются в САР для заведения обратной связи по углу поворота исполнительного элемента, скорости вращения нагрузки и т.д., преобразуя неэлектрическую величину в электрический сигнал. Любой измеритель рассогласования строится на основе первичных измерительных преобразователей (ПИП), соединенных по каскадной или компенсационной схеме. В качестве ПИП применяются потенциометры, сельсины и вращающиеся трансформаторы, если требуется отследить отработку угла поворота и тахогенераторы, если нужно отследить отработку по скорости.
В качестве измерителей рассогласования в САР с постоянными токами целесообразно использовать потенциометрические первичные измерительные преобразователи. Для систем с ограниченным углом поворота применяется компенсационная схема представленная на рис.7
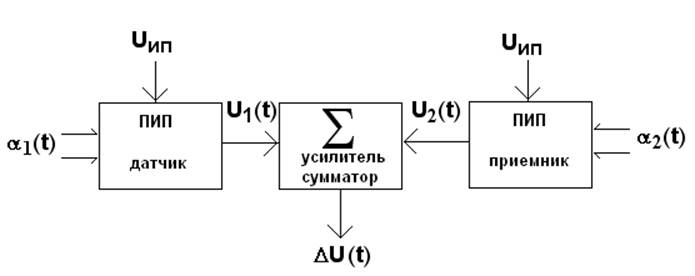
рис.7 ИР на потенциометрах, построенный по компенсационной схеме.
![]()
Для построения измерителя рассогласования берут одинаковые потенциометры с одинаковым сопротивлением. Тогда коэффициент измерителя рассогласования вычисляется по формуле:
 , где Uип –
напряжение питания ПИП (желательно как у двигателя), φн – угол активной зоны
потенциометра.
, где Uип –
напряжение питания ПИП (желательно как у двигателя), φн – угол активной зоны
потенциометра.
Ошибка измерителя рассогласования определяется по формуле:
![]() , где χД –
ошибка датчика, χП – ошибка приемника.
, где χД –
ошибка датчика, χП – ошибка приемника.
Так как потенциометры одинаковые, то:
 , где ε – допустимое
отклонение выходного напряжения от линейной зависимости в процентах, αм
– максимальный угол поворота нагрузки из технического задания.
, где ε – допустимое
отклонение выходного напряжения от линейной зависимости в процентах, αм
– максимальный угол поворота нагрузки из технического задания.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.