2.4. Расчёт частотной зависимости входного сопротивления фильтра.
Частотные зависимости входного сопротивления полиномиальных фильтров дают возможность оценить степень согласованности фильтров с сопротивлением источника сигнала (генератора) Rг и сопротивлением нагрузки Rн.
![]() Для
схем,содержащих нечётное число элементов при Rг =Rн, входные сопротивления со стороны зажимов 1-2 и
3-4 равны (Zвх 1-2 = Zвх
3-4; см. рис.2). В этом случаи достаточно рассчитать одну из частотных
зависимостей входного сопротивления Zвх(f). Для схем фильтров, содержащих чётное число
элементов, и рассчитываются оба входных сопротивления.
Для
схем,содержащих нечётное число элементов при Rг =Rн, входные сопротивления со стороны зажимов 1-2 и
3-4 равны (Zвх 1-2 = Zвх
3-4; см. рис.2). В этом случаи достаточно рассчитать одну из частотных
зависимостей входного сопротивления Zвх(f). Для схем фильтров, содержащих чётное число
элементов, и рассчитываются оба входных сопротивления.
 |
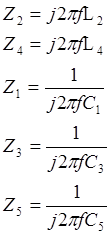
Рассчитаем входное сопротивление фильтра. Порядок фильтра n=5,
следовательно Zвх1-2 = Zвх3-4 . Запишем формулы для расчёта Zвх1-2 = Zвх3-4 :
 |
![]() Поскольку Zвх(f) представляет собой
комплексное сопротивление, зависящее от частоты, то рассчитываются частотные
зависимости модуля входного сопротивления |Zвх(f)| в Омах и угла входного сопротивления в градусах:
Поскольку Zвх(f) представляет собой
комплексное сопротивление, зависящее от частоты, то рассчитываются частотные
зависимости модуля входного сопротивления |Zвх(f)| в Омах и угла входного сопротивления в градусах:
Расчёты удобно выполнять на ЭВМ. Результаты расчётов приведены в таблице 4, а графическое изображение частотных зависимостей
![]()
|Zвх(f)|, приведено в приложении на графике 4.
Таблица №4.
|
f,Гц |
|Zвх|,Ом |
j,град |
f,Гц |
|Zвх|,Ом |
j,град |
|
0 |
300 |
0 |
3000 |
313,7 |
-28,8 |
|
200 |
290,47 |
-9,2 |
3200 |
277,2 |
-33,8 |
|
400 |
266,19 |
-16,6 |
3400 |
239,7 |
-34,2 |
|
600 |
235,87 |
-21,3 |
3600 |
213,8 |
-27,7 |
|
800 |
206,57 |
-23 |
3800 |
218,3 |
-13,6 |
|
1000 |
182,20 |
-21,5 |
4000 |
306,8 |
0,33 |
|
1200 |
164,98 |
-17,2 |
4200 |
585,9 |
-9,39 |
|
1400 |
156,72 |
-10,5 |
4400 |
700,98 |
-55 |
|
1600 |
159,17 |
-2,8 |
4600 |
479,1 |
-78,9 |
|
1800 |
173,71 |
3,9 |
4800 |
358 |
-85,6 |
|
2000 |
200,92 |
7,9 |
5000 |
292,8 |
-87,9 |
|
2200 |
239,7 |
7,7 |
5800 |
187,1 |
-89,8 |
|
2400 |
284,9 |
2,8 |
6400 |
153,5 |
-89,9 |
|
2600 |
322,4 |
-6,4 |
7000 |
131,9 |
-89,97 |
|
2800 |
333,6 |
-17,8 |
8400 |
104,73 |
-89,99 |
3. Расчёт корректора фазочастотной характеристики фильтра.
Фазочастотные корректоры включаются в тракты передачи сигналов для формирования линейной фазочастотной характеристики. При этом выравнивается и приближается к постоянному групповое время распространения сигналов.
3.1. Определение требуемой частотной характеристики фазового сдвига корректора.
Задаёмся линейной характеристикой bр=(1,1…1,4)bф max.
Определяем bк тр=bр-bф.
Частотные зависимости представлены в приложении на графике 5.
3.2. Выбор схемы корректора и расчёт параметров его элементов.
Затухание корректора должно быть минимальным, а характеристическое сопротивление – постоянным, не зависящим от частоты. Этим условиям удовлетворяют симметричные мостовые схемы с реактивными взаимообратными сопротивлениями Z1 и Z2. Так как максимальное значение требуемого фазового сдвига корректора не превышает 180 градусов, то для построения корректора используем фазовый контур первого порядка (см. рис. 3).
|

Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.