Лабораторная работа №7
Кинематический анализ и синтез зубчатых механизмов
Цель работы: аналитическое определение передаточных отношений зубчатых редукторов, планетарных механизмов и коробок скоростей; подбор чисел зубьев планетарных механизмов; изучение правил выполнения кинематических схем.
Оборудование: модели двухступенчатых зубчатых редукторов; коробка скоростей; модели и схемы планетарных редукторов.
Краткие теоретические сведения
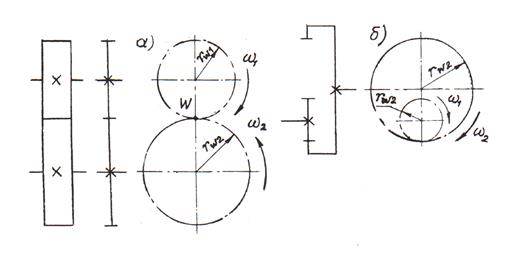
Передаточное отношение механизма передачи вращательного движения равно отношению угловых скоростей ω либо частот вращения n. При работе зубчатой передачи начальные окружности радиусов rw1 и rw2 перекатываются друг по другу без скольжения (рис. 7.1, а,б), поэтому их линейные скорости равны друг другу:
|
Рис. 7.1. Кинематические схемы внешнего и внутреннего зубчатых зацеплений |
В нулевых передачах начальные радиусы совпадают с делительными, т.е. rw = r. Из формулы (7.1) следует:
|
|
(7.2) |
Поскольку в зубчатом зацеплении могут находиться колеса только одного модуля, то отношение радиусов можно заменить отношениями чисел зубьев:
|
|
(7.3) |
С учётом формул (7.2) и (7.3) передаточное отношение зубчатой передачи определяют следующими отношениями:
|
где z2 – число зубьев ведомого колеса; z1 - число зубьев ведущего колеса. |
Угловые скорости могут быть положительными при направлении против часовой стрелки и отрицательными – по часовой стрелке. Соответственно могут быть разными знаки передаточного отношения: «минус» для внешнего зацепления (рис. 7.1, а, колёса вращаются в противоположные стороны) и «плюс» для внутреннего (рис. 7.1, б).
Передаточное отношение многоступенчатой зубчатой передачи равно произведению передаточных отношений отдельных ступеней:
|
Рис. 7.2. Кинематическая схема серии зубчатых колес |
Для цилиндрического трехступенчатого редуктора (рис. 7.2) формула (7.5) с учетом формулы (7.4) может быть записана так:
|
|
(7.6) |
где m – число внешних зацеплений.
На схеме рис. 7.2 m = 3, поэтому знак общего передаточного отношения - «минус», что указывает на противоположное направление вращения колес 1 и 4. Направления угловых и прямых стрелок нарис. 7.2 подтверждают вышесказанное. При использовании прямых стрелок колесу 1 задают произвольное направление, например, вправо. При внешнем зацеплении z1/z2 звено 2 будет иметь противоположное вращение (стрелка влево). Аналогично звено 3 имеет вращение, противоположное 2 (стрелка вправо) и, наконец, звено 4 вращается противоположно 3 (стрелка влево). В результате стрелки звеньев 1 и 4 будут иметь противоположные направления вращения.
Коробка скоростей
В коробке скоростей (рис. 7.3, а) передаточное отношение имеет несколько значений. От вала I к валу II движение передается по двум потокам: от шестерни 1 к колесу 2 или от шестерни 1 ́ к колесу 2 ́ в зависимости от положения блока шестерен z.1-z1 ́ . При передаче движения между валами II и III каждый поток будет иметь по три варианта передаточных отношений между колесами, соответственно z2.1/z3, z2.2/z3 ́ и z2.3/z3 ́́́ ́.
Все возможные варианты угловых скоростей выходного вала либо передаточных отношений между валами I и III отражают в виде графика — лучевой диаграммы (рис. 7.3, б). Общее передаточное отношение двухступенчатой передачи:
![]() , где
, где ![]() и
и
![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
Рис. 7.3. Коробка скоростей
Зубчато-рычажные механизмы, к которым относятся планетарные, дифференциальные и др., в отличие от простых зубчатых, имеют подвижные оси. В планетарных механизмах одно из зубчатых колес неподвижно в отличие от дифференциальных, где все колёса вращаются. Одна из схем планетарного механизма представлена на рис. 7.4 (редуктор Джеймса). Колеса 1 и 3 называются центральными, из них колесо 1 — солнечное, колесо 3 (неподвижное) — корончатое (опорное). Звено 2 — сателлит (спутник), оно совершает сложное движение. Рычажное звеноh— водило. Передаточное отношение от солнечного колеса 1 к водилу hпри закреплённом корончатом колесе 3 определяют по формуле Виллиса:
|
|
(7.7) |
|
Рис. 7.4. Редуктор Джеймса |
|
|
где Обращённый механизм - простой зубчатый двухступенчатый редуктор с паразитным колесом 2. Почти все планетарные механизмы имеют два зацепления. В соответствии с формулой (7.5)
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.





 .
. .
. ,
(7.4)
,
(7.4)

 .
(7.8)
.
(7.8)