(9)).
2.3 Метод сопряженных градиентов для решения СЛАУ с несимметричной матрицей.
2.3.1 Симметризация СЛАУ с помощью домножения на транспонированную матрицу
Если необходимо решать СЛАУ с несимметричной матрицей, то
одним из вариантов может быть следующий. Так метод сопряженных градиентов
применим только для симметричных, положительно определенных матриц, то
несимметричную систему ![]() необходимо преобразовать к
симметричной с помощью некоторых эквивалентных преобразований. Это можно
сделать, умножив слева систему на матрицу
необходимо преобразовать к
симметричной с помощью некоторых эквивалентных преобразований. Это можно
сделать, умножив слева систему на матрицу ![]() . В
результате перейдем к новой СЛАУ:
. В
результате перейдем к новой СЛАУ:
![]() , где
, где

Матрица системы (10) будет симметричной, положительно определенной.
Покажем это. Действительно, ![]() , что говорит о
симметричности матрицы
, что говорит о
симметричности матрицы ![]() .
.
Положительная определенность матрицы ![]() следует
из того, что
следует
из того, что ![]() .
.
Построим теперь итерационную процедуру для системы (6).
Естественно, что она должна строится так, чтобы не было необходимости хранить
матрицу ![]() . Запишем схему (1) для системы (10):
. Запишем схему (1) для системы (10):

Замечания:
2.3.2 Метод сопряженных градиентов для несимметричной
СЛАУ с использованием неполной ![]() - факторизации.
- факторизации.
Рассмотрим другой способ перехода к СЛАУ с симметричной,
положительно определенной матрицей. Будем решать вместо исходной СЛАУ (1)
предобусловленную СЛАУ ![]() , в которой
, в которой
Здесь ![]() и
и ![]() - матрицы неполной факторизации
исходной матрицы (см. замечание к этому пункту). Покажем, что
- матрицы неполной факторизации
исходной матрицы (см. замечание к этому пункту). Покажем, что ![]() - симметричная, положительно определенная
матрица. Действительно, вводя обозначение
- симметричная, положительно определенная
матрица. Действительно, вводя обозначение ![]() ,
получим
,
получим ![]() , а значит
, а значит ![]() - симметричная, положительно
определенная матрица (см. пункт 2.3.1). Таким образом, мы по сути применили
описанный в п. 2.3.1 метод для предобусловленной СЛАУ (1)
- симметричная, положительно
определенная матрица (см. пункт 2.3.1). Таким образом, мы по сути применили
описанный в п. 2.3.1 метод для предобусловленной СЛАУ (1) ![]() (с учетом
(с учетом ![]() систему
(1) можно записать
систему
(1) можно записать ![]() ). Тогда для СЛАУ
). Тогда для СЛАУ
![]()
схему (3) можно записать в виде:
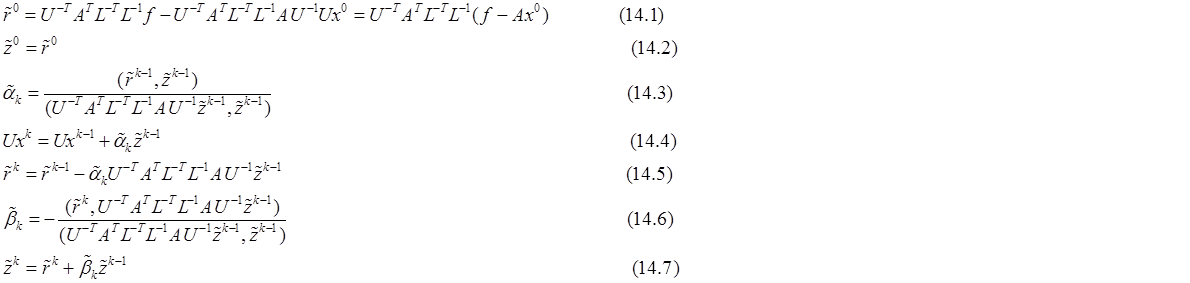 Стоит отметить, что вместо
вычисления вектора
Стоит отметить, что вместо
вычисления вектора ![]() удобнее вычислять вектор
удобнее вычислять вектор ![]() по формуле:
по формуле:
![]()
Т.е. на каждой итерации мы будем иметь решение исходной
СЛАУ, а не предобусловленной. В этом случае вместо вектора ![]() нужно рекуррентно вычислять вектор
нужно рекуррентно вычислять вектор ![]() по формуле
по формуле
![]()
Введем с целью минимизации вычислительных затрат вектора
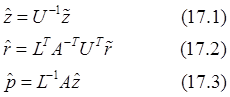
и преобразуем схему (14.1) – (14.7). Будем иметь:
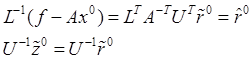
С другой стороны ![]() . Отсюда, учитывая
. Отсюда, учитывая ![]() , получаем
, получаем ![]() . Кроме
того, из соотношения (17.3) находим
. Кроме
того, из соотношения (17.3) находим ![]() . Преобразуем теперь
итерационный процесс (14.3) – (14.7). Имеем:
. Преобразуем теперь
итерационный процесс (14.3) – (14.7). Имеем:
![]() . Теперь учитывая наши замены,
можно записать
. Теперь учитывая наши замены,
можно записать ![]() ,
, ![]() ,
, ![]() . Тогда
. Тогда ![]() . Далее
. Далее
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.