![]() , (4.19)
, (4.19)
здесь ![]() -
настраиваемые коэффициенты, i={0, 1,…,n-1}.
-
настраиваемые коэффициенты, i={0, 1,…,n-1}.
Пусть коэффициенты
регулятора образуют вектор ![]() , размерности -
, размерности -![]() , тогда алгоритм адаптации со старшей
производной запишется в виде
, тогда алгоритм адаптации со старшей
производной запишется в виде
![]() (4.20)
(4.20)
или ![]() (4.21)
(4.21)
где ![]() –
матрица коэффициентов передачи,
–
матрица коэффициентов передачи, ![]() ;
;![]() – вспомогательные
вектор-функции. Для сходимости процессов в
системе (4.9), (4.19), (4.20) элементы вектор-функции
– вспомогательные
вектор-функции. Для сходимости процессов в
системе (4.9), (4.19), (4.20) элементы вектор-функции ![]() определяются
следующим образом [33]:
определяются
следующим образом [33]:
![]() (4.22)
(4.22)
где  Таким
образом, адаптивный регулятор описывается уравнениями
Таким
образом, адаптивный регулятор описывается уравнениями
 (4.23)
(4.23)
Согласно (4.22) элементы ![]() вектор-функции
вектор-функции ![]() имеют
следующий вид:
имеют
следующий вид:
Для реализации синтезированного закона управления (4.23) требуется информация о производных выходной переменной, оценку которых можно получить с помощью линейной малоинерционной динамической системы. Обычно такая система называется либо дифференцирующим фильтром, либо фильтром оценки производных (ФОП). Дифференциальное уравнение ФОП имеет вид:
![]() , где
, где ![]() -
оценка
-
оценка ![]() . С учетом фильтра оценки производных
порядок адаптивной системы равен
. С учетом фильтра оценки производных
порядок адаптивной системы равен ![]() где
где ![]() - число
контуров настройки коэффициентов адаптивного регулятора,
- число
контуров настройки коэффициентов адаптивного регулятора, ![]() , значение
, значение ![]() зависит
от количества неизвестных параметров и присутствия внешнего возмущения в
объекте управления.
зависит
от количества неизвестных параметров и присутствия внешнего возмущения в
объекте управления.
4.2.3. Синтез адаптивной системы пониженного порядка
Сначала рассмотрим расчет адаптивной системы для объекта с модифицированной моделью 1-го вида (4.13).

здесь ![]() , причем
, причем ![]() равны либо расчетным номинальным
значениям, либо априори известным верхним оценкам соответствующих
коэффициентов. Таким образом, требуется парирование только аддитивного
возмущения
равны либо расчетным номинальным
значениям, либо априори известным верхним оценкам соответствующих
коэффициентов. Таким образом, требуется парирование только аддитивного
возмущения ![]() .
.
Следуя изложенной в п.4.2.2 последовательности расчета, закон управления в системе с одним контуром адаптации имеет вид:
 ,
(4.24)
,
(4.24)
алгоритм сигнальной настройки:
![]() . (4.25)
. (4.25)
В данном случае порядок
адаптивной системы с одним контуром адаптации равен ![]() Структурная
схема системы пониженного порядка с сигнальной адаптацией представлена на рис.
4.10. Нетрудно видеть, что полученная система может быть отнесена к классу
робастных систем с астатическим регулятором (астатический регулятор со старшей
производной). Таким образом, приведение модели линейного нестационарного
объекта к виду (4.13) позволяет свести задачу синтеза адаптивного регулятора к
задаче синтеза астатического регулятора со старшей производной.
Структурная
схема системы пониженного порядка с сигнальной адаптацией представлена на рис.
4.10. Нетрудно видеть, что полученная система может быть отнесена к классу
робастных систем с астатическим регулятором (астатический регулятор со старшей
производной). Таким образом, приведение модели линейного нестационарного
объекта к виду (4.13) позволяет свести задачу синтеза адаптивного регулятора к
задаче синтеза астатического регулятора со старшей производной.
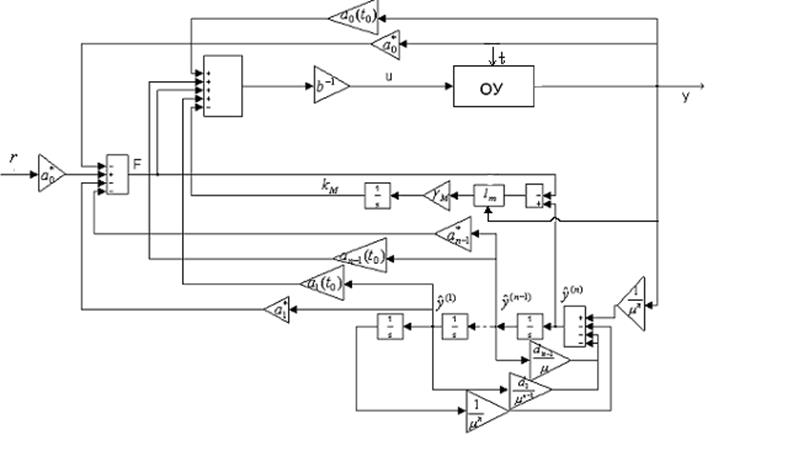
Рис. 4.10
Перейдем к рассмотрению модифицированной модели второго вида
 (4.26)
(4.26)
в которой помимо неизвестной функции M(t) присутствует неизвестный переменный параметр ![]() , т.е. на объект действуют
параметрическое и аддитивное возмущения. Согласно последовательности синтеза
адаптивной системы, в идеальный закон управления вводится два настраиваемых
коэффициента
, т.е. на объект действуют
параметрическое и аддитивное возмущения. Согласно последовательности синтеза
адаптивной системы, в идеальный закон управления вводится два настраиваемых
коэффициента
 , (4.27)
, (4.27)
 (4.28)
(4.28)
Порядок адаптивной системы с
двумя контурами адаптации равен ![]() Структурная схема
системы пониженного порядка с сигнально-параметрической адаптацией представлена
на рис. 4.11.
Структурная схема
системы пониженного порядка с сигнально-параметрической адаптацией представлена
на рис. 4.11.
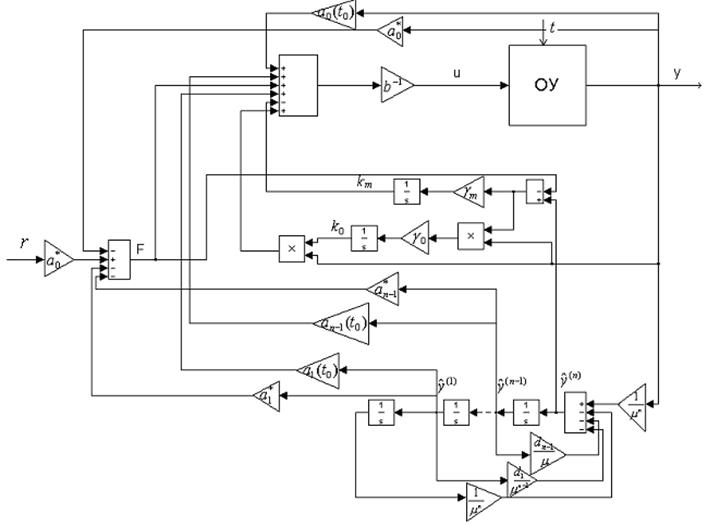
Рис. 4.11
Вид переходных процессов
в одноканальной стационарной системе зависит от расположения корней ![]() характеристического многочлена. Поэтому
формирование эталонного дифференциального уравнения связано с определением
корней желаемого характеристического многочлена. Порядок желаемого
дифференциального уравнения определяется порядком объекта управления (4.9).
Поэтому выбираем n корней
характеристического многочлена. Поэтому
формирование эталонного дифференциального уравнения связано с определением
корней желаемого характеристического многочлена. Порядок желаемого
дифференциального уравнения определяется порядком объекта управления (4.9).
Поэтому выбираем n корней ![]()
![]()
![]() ,
часть из которых может быть комплексно-сопряженными, и записываем желаемое
характеристическое уравнение:
,
часть из которых может быть комплексно-сопряженными, и записываем желаемое
характеристическое уравнение:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.