Матрицы аналоговой и дискретной моделей потребуются при выполнении следующей лабораторной работы, поэтому значения матриц A, B, C и D внимательно перепишите в рабочую тетрадь. Но так как на рабочее поле по умолчанию данные выводятся с низкой точностью, необходимо настроит Matlab на вывод более точного формата. Для настройки в рабочем окне “Matlab” выберите в меню File позицию Preferences, далее позицию Command Window и в поле настройки Numeric format выберите позицию long. Кроме того, для обеспечения более компактного использования площади монитора в поле Numeric display выберите позицию compact.
Для исследования переходных процессов и сравнительной оценки непрерывной и дискретной моделей необходимо в командном окне Matlab ввести функцию ltiview. На экран монитора будет выведено окно LTI Viewer, представленное на рис.3.3.
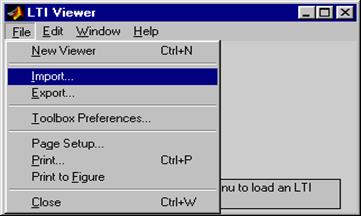
Рис.3.3
В меню File окна LTI Viewer следует активизировать позицию Import… , в результате чего на экране монитора будет отображено окно (рис. 3.4) со списком созданных моделей. В списке следует выделить имена процессов, которые намечается исследовать. Для этого щелкните левой кнопкой мыши по выбираемым позициям при нажатой клавише Ctrl. На рис.3.4 это позиции Sss иZss. После этого нажмите кнопку Ok. Появится окно, приведенное на рис.3.5, на котором изображены исследуемые процессы. Гладкие кривые отображает процессы в непрерывной системе, а ступенчатые кривые – в цифровой.
Поле окна на рис.3.5 разбито на два столбца по три окна в каждом с отображением переходных процессов. В первом столбце показаны процессы, вызванные входным воздействие U1 = uy, а во втором -процессы, вызванные приложением нагрузки U2 = iс.
Масштабы кривых тока и скорости в правом столбце увеличены в 20 раз, чтобы можно было наблюдать и анализировать кривые переходных процессов. В противном случае они практически сливаются с осями координат. Увеличение масштаба выполнено умножением коэффициента b32 матрицы B на 20, что вызвало увеличение нагрузки Ic в двадцать раз. Графики переходных процессов можно отобразить с координатными сетками. Для этого следует щелкнуть правой кнопкой мыши на любом из графиков и выбрать позицию Grid в выпавшем меню.

Рис.3.4
По умолчанию в окно на рис.3.5 выводятся кривые реакции системы на единичный скачок входного воздействия (Step). Можно исследовать реакцию системы и на единичный импульс. Для этого надо сделать щелчок правой кнопкой мыши по одному из графиков переходных процессов и из выпавшего меню выбрать позицию Plot Time, а в следующем выпадающем меню – позицию Impulse. На экране монитора будет отображено окно с графиками весовых функций.
4. Цифровые модели непрерывных объектов
в передаточных функциях и структурных схемах
На практике при исследовании непрерывных и дискретных систем широко используются методы, основанные на передаточных функциях и структурных схемах.
На основании уравнений (2.1)…(2.5) составим передаточные функции динамических звеньев электромеханической системы. Для этого к уравнениям (2.1)… (2.5) применим непрерывное преобразование Лапласа, которое формально состоит в замене оператора дифференцирования d/dt на оператор р, тогда уравнение (2.1) примет вид:
![]() .
(4.1)
.
(4.1)
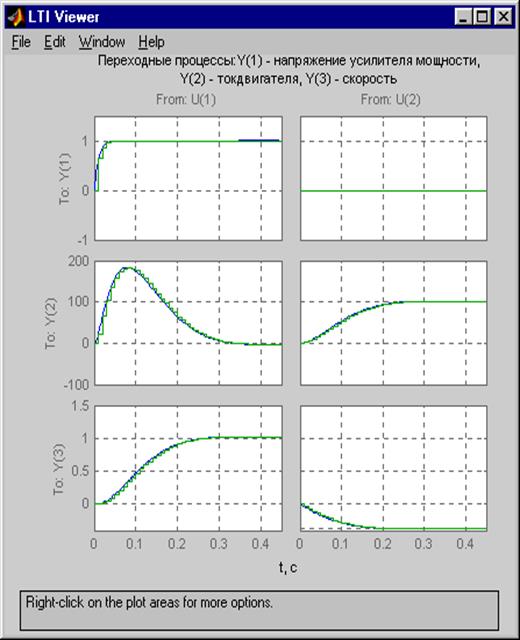
Рис.3.5
Уравнению (2.2) с учетом соотношения (2.5) соответствует операторное уравнение
Uя(p)-сфw(p)=RяIя(p)+LяpIя(p), (4.2)
а уравнение (2.3) с учетом соотношения (2.4) преобразуется к виду:
Jpw(p)=cФ(Iя(p)-Ic(p)). (4.3)
Операторным уравнениям (4.1), (4.2) и (4.3) соответствуют следующие передаточные функции:
![]()
![]() ,
(4.4)
,
(4.4)
 , (4.5)
, (4.5)
 (4.6)
(4.6)
Используя передаточные функции (4.4), (4.5) и (4.6) построим структурную схему элетромеханической системы, изображенной на рис.4.1.

|
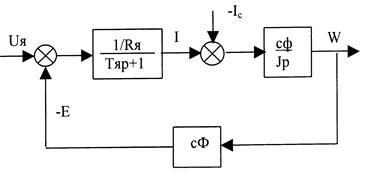
Рис.4.1
На основании структурной схемы, в свою очередь, можно составить операторное уравнение объекта в функции оператора p:
 .
.
Раскроем скобки и выполним преобразования. В результате получим:
![]()
![]() ,
(4.7)
,
(4.7)
где ![]() - электромеханическая постоянная времени.
- электромеханическая постоянная времени.
Из последнего соотношения запишем передаточные функции по управляющему воздействию при Ic=0
 (4.8)
(4.8)
и возмущающему воздействию при UЯ=0
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.