УДК 62-83:681.51:382.3
Модели непрерывных объектов и их дискретизация в среде Matlab: Методические указания к лабораторным работам / Сост.: П.Н. Кунинин: СибГИУ; - Новокузнецк, 2003. - 20с.
Рассматриваются приемы построения моделей непрерывных объектов управления и их преобразование в цифровые формы с использованием среды Matlab. Предлагаемая методика без каких либо изменений может быть применена для преобразования передаточных функций аналоговых регуляторов в эквивалентные цифровые
Предназначено для студентов специальностей "Промышленная электроника" (200400) и "Электропривод и автоматика промышленных установок и технологических комплексов" (180400).
Рецензент - кафедра электротехники и электрооборудования Сибирского государственного индустриального университета (зав. кафедрой М.В. Кипервассер)
Печатается по решению редакционно-издательского совета университета.
Аналоговые модели непрерывных объектов создаются на базе физических законов и строятся, как правило, в форме передаточных функций, обыкновенных дифференциальных уравнений и уравнений состояния. В тоже время регулятор в микропроцессорной системе управления по физической сущности является дискретным и имеет место определенная несовместимость дискретного регулятора с непрерывным объектом управления. Это способствовало тому, что теория проектирования дискретных регуляторов микропроцессорных систем для управления непрерывными объектами развивалась в двух принципиально различных направлениях.
При первом подходе синтезируется аналоговый регулятор и либо подвергается процедуре квантования заменой дифференциалов конечными приращениями, либо преобразуется в эквивалентную дискретную форму с применением z-преобразования. При втором подходе создается дискретная динамическая модель непрерывного объекта управления, а затем проектируется цифровой регулятор непосредственно на основе дискретной модели.
Хотя цифровая технология позволяет хорошо моделировать работу аналоговых регуляторов, ее возможности гораздо шире и полностью не используются при первом подходе. Если регулятор сначала проектируется как аналоговый, а затем преобразуется в дискретную форму, то из условий обеспечения устойчивости вычислительного процесса и синтезируемой системы управления, период дискретизации приходиться выбирать существенно меньшим, чем в случае, когда регулятор спроектирован на основе дискретной модели. Кроме того, в микропроцессорных системах можно построить нелинейные и самонастраивающиеся регуляторы, которые невозможно создать на основе только аналоговых средств.
При проектировании и моделировании микропроцессорных регуляторов и систем надо уметь преобразовывать непрерывные уравнения состояния и передаточные функции в дискретную форму. Это необходимо для синтеза дискретных передаточных функций регуляторов с последующим их преобразованием в рекуррентные разностные уравнения. Разрешенные относительно неизвестных выходных переменных регуляторов рекуррентные разностные уравнения являются хорошим алгоритмом для разработки программ управления.
Указанные задачи имеют достаточно простое решение, но требуют для своей реализации громоздких и утомительных преобразований.
Универсальным средством разработки математических моделей дискретных регуляторов для аналоговых и дискретных объектов управления является интегрированные в MATLAB 6.0 пакеты расширения Control System Toolbox и Simulink. Достоинством этих пакетов является то, что они простыми методами обеспечивают преобразование одних форм моделей в другие. Кроме того, легко могут быть применены алгоритмы повышенной точности для преобразования непрерывных моделей объектов управления и регуляторов в цифровые, которые при применении обычных средств оказываются недоступными из-за своей сложности. В частности, не вызывает осложнений применение экстраполятора первого порядка, благодаря чему может быть существенно увеличен шаг дискретизации в проектируемой системе.
Целью лабораторной работы является освоение приемов создания цифровых моделей непрерывных объектов по их структурным схемам, дифференциальным уравнениям и уравнениям состояния. Преобразование одних форм моделей в другие с использованием программной системы Matlab-Control System Toolbox.
2. Исходные данные для создания цифровых моделей
непрерывных объектов и систем
В данном пособии рассматриваются методы создания цифровых моделей непрерывных объектов управления в виде структурных схем, передаточных функций и уравнений состояния, а также моделей цифровых регуляторов.
Приемы создания моделей непрерывных объектов управления и их преобразование в эквивалентные цифровые модели рассмотрим на примере исполнительной электромеханической системы. Электромеханическая система состоит из электрического двигателя, рабочего механизма и управляемого источника энергии, в общем случае инерционного.
Создание модели начинается с декомпозиции электромеханической системы. В ней выделяются управляемый источник энергии, якорная цепь двигателя и механическая часть. При моделировании механической части учитывается момент инерции объекта управления. Поскольку объект непрерывный, предварительно создаются аналоговые модели, а цифровые модели формируются на их основе.
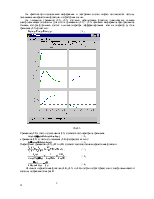
Управляемый источник энергии в общем случае описывается инерционным звеном первого порядка:
![]() , (2.1)
, (2.1)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.