Перечисленные подсистемы взаимосвязаны, поэтому конкретное функциональное решение по одной из них предъявляет определенные требования к остальным. Функциональное взаимодействие подсистем является базой для формирования структуры ГПС.
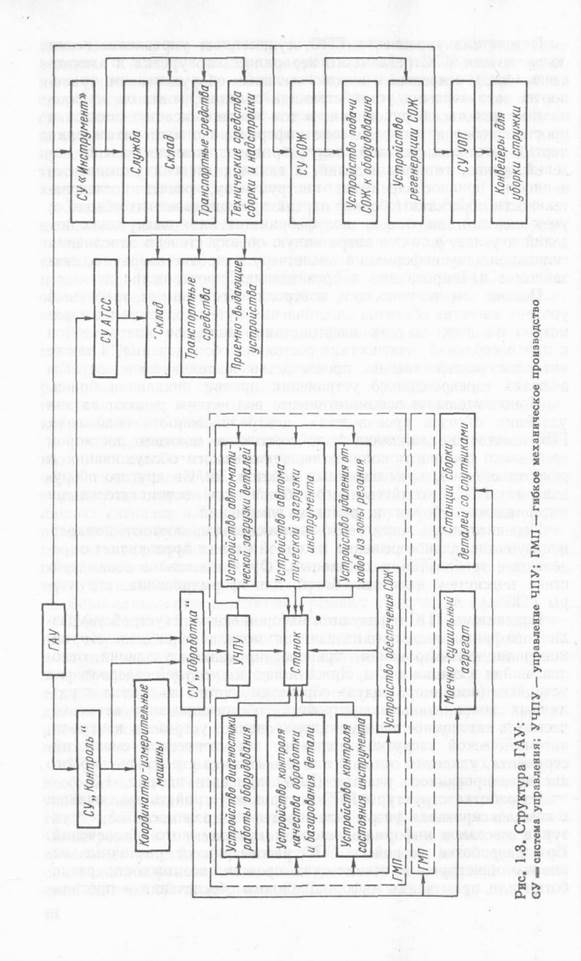
Подсистемы ГПС образуются набором модулей (устройств) различного функционального назначения: модулей обработки, сборки, контроля, складирования, транспортирования, удаления отходов, мойки и сушки и т. п. Каждый из этих модулей содержит ряд устройств (например, модуль обработки состоит из станка и различных дополнительных устройств, обеспечивающих автоматическое и автономное его функционирование, устройств контроля, автоматической загрузки заготовок, автоматической смены инструмента, удаления отходов и т. п.). Пример структуры гибкого автоматизированного участка (ГАУ) приведен на рис. 1.3.
Разработка структуры ГПС на уровне устройств заключается в комплексировании устройств, определении взаимосвязей, структур и массивов информационного и программного обеспечении.
 |
Структуру устройств ГПС можно представить более детально, разбив каждое устройство на отдельные элементы - исполнительные механизмы, электрический привод, систему управления, информационное устройство и др. Такое уточнение производится в ходе конструкторской проработки на основании выявленных эксплуатационных параметров (грузоподъемности, скорости, объемов транспортирования и хранения, загрузки, необходимости автоматического управления и т. д.), в результате чего разрабатываются технические требования и ТЗ на проектирование требуемых технических средств.
Окончательно структура ГПС определяется после конструкторской проработки на стадии технического проекта. Определение функционирования ГПС дает основание для разработки ее организационной структуры. С точки зрения организационной структуры ГПС состоит из производственных подразделений и служб, реализующих функциональное назначение ГПС и ее подсистем. Организационные подсистемы могут содержать несколько функциональных подсистем, совпадать по назначению с функциональной подсистемой или реализовать только часть ее.
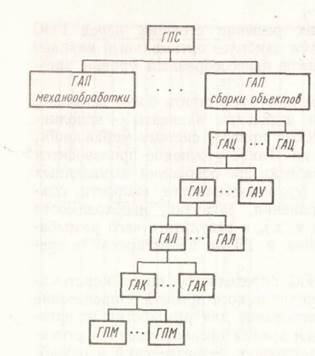
По организационным признакам ГПС делится на следующие виды (рис. 1.4): гибкий автоматизированный комплекс (ГАК); гибкую автоматизированную линию (ГАЛ); гибкий автоматизированный участок (ГАУ); гибкий автоматизированный цех (ГАЦ).
Таким образом, ГПС является обобщающим понятием, распространенным на функциональные и организационные структуры и виды гибкого автоматизированного производства. В состав структурных единиц ГПС может быть включено также и неавтоматизированное оборудование. Если в ГПС входят промышленные роботы, например гибкая роботизированная линия или гибкий роботизированный комплекс (ГРТК) и др., то их называют роботизированными структурными единицами.
|
Рисунок 1.4 Организационная структура ГПС |
Отдельные структурные единицы ГРТК также строятся по модульному принципу. В качестве основного производственного модуля используется гибкий производственный модуль (ГПМ). Согласно ГОСТ 26228—85, под ГПМ понимается единица технологического оборудования, оснащенная системой ЧПУ или каким-либо другим устройством программного управления и функционирующая как самостоятельно, так и в составе ГПС; при этом все функции, связанные с изготовлением изделия, должны осуществляться автоматически.
В общем случае средства автоматизации ГПМ включают накопители заготовок, режущего и мерительного инструмента, приспособлений; устройство загрузки-выгрузки обрабатываемых изделий; устройство удаления отходов; устройство автоматизированного контроля; устройство диагностирования технического состояния оборудования и инструмента; системы автоматической переналадки; устройство обеспечения точности переналадки; устройство стабилизации технологического процесса и др. Совокупность единицы технологического оборудования, промышленного робота и средств оснащения, функционирующих автономно и многократно осуществляющих рабочие циклы, называется технологическим комплексом (РТК).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.