преобразователем угла поворота рамы приведена на рис. 13
. ![]()
Данный прибор предназначен для измерения проекции угловой скорости ω y1 поэтому ось OY является осью
чувствительности (входной осью), ось ОХ — выходной осью прибора.
При вращении Л А вокруг оси OY, вектор кинетического момента H будет стремиться совместиться с вектором угловой скорости ω y1
Такое движение гироскопа обусловлено появлением гироскопического момента, действующего относительно оси подвеса рамы ОХ1
где β - угол поворота гироскопа.
При повороте гироскопа со стороны пружины возникает противодействующий момент
![]()
где l1 - плечо действия сил упругости: Купр =сl; - коэффициент
упругости.
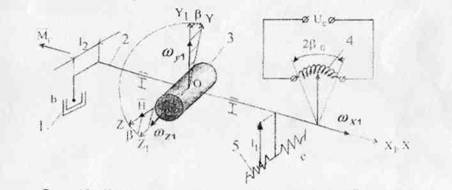
Рис. 13. Кинематическая схема датчика угловой скорости с механической пружиной: OX1Y1Z-, - система координат, связанная с ЛА; OXYZ - система координат, связанная с гироскопом;1 - демпфирующее устройство; 2 - ось подвеса рамы гироузла; 3 - гироузел; 4 - потенциометрический преобразователь угла поворота гироузпа; 5 - механическая противодействующая пружина
В переходных режимах к гироскопу будут приложены как инерционный момент так и демпфирующий
 Датчики угловых скоростей (ДУС), предназначенные для измерения угловой
скорости вращения самолета вокруг какой-либо из связанных его осей, применяются
в качестве чувствительных
Датчики угловых скоростей (ДУС), предназначенные для измерения угловой
скорости вращения самолета вокруг какой-либо из связанных его осей, применяются
в качестве чувствительных
элементов автопилотов, а также бескарданных систем ориентации и бескарданных инерциальных навигационных систем.
Принципиальная схема ДУСа отличается от рассмотренной схемы гироскопа с двумя степенями свободы с пружиной тем, что здесь повороты рамки гироскопа преобразуются в перемещение золотника или в электрические сигналы, величина которых пропорциональна измеряемой угловой скорости.
Типовой для современных датчиков угловой скорости является схема с так называемой «электрической» пружиной (рис. 11.2). При вращении гироскопа вокруг оси у с угловой скоростью Qve возникает гироскопический момент — действующий вокруг оси х, и ротор гироскопа 5, а вместе с ним щетки 1 поворачиваются на угол Р вокруг оси х, щетки смещаются относительно средних точек потенциометра 2. Если напряжение, подводимое к потенциометру 2, равно Uc, то напряжение е, снимаемое со щеток 1 потенциометра.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.