Министерство образования и науки
Украины
Харьковский национальный университет радиоэлектроники
Выполнил: Руководитель работы: ст. гр. ЭА-04-6 Евстратов Н.Д.
Утицких Ю.С.
Харьков 2005
Содержание.
Исходные данные..........................................................................................4
Введение .......................................................................................................5
1. Динамический анализ механизма......................................................... 6
1.1. Структурный анализ механизма..........................................................6
1.2. Кинематический анализ механизма. ..................................................7
1.3. Кинетостатический анализ механизма. .............................................12
2. Проектный расчет механизма на прочность. .......................................15
2.1. Определение реакций в опорах. .........................................................15
2.2. Построение эпюр. ................................................................................16
2.3. Подбор сечений ....................................................................................17
Выводы .................................................................................................19
Список литературы............................................................................20
|
Параметры |
Значения |
||
|
3. |
Частота вращения nАВ об/мин |
700 |
|
|
4. |
LАВ , мм |
30 |
|
|
5. |
LАС , мм |
90 |
|
|
6. |
LEF , мм |
125 |
|
|
7. |
LCD , мм |
50 |
|
|
8. |
LAE , мм |
45 |
|
|
9. |
Расстояние а, мм |
35 |
|
|
10. |
Расстояние в, мм |
70 |
|
|
11. |
Расстояние с, мм |
75 |
|
|
12. |
Центры тяжести S1 ,S2 ,S3 ,S4 ,S5 размещены посредине сооответствующих звеньев |
||
|
13. |
Масса звеньев m=ql,q=0.1кг/м |
||
|
14. |
Момент инерции звеньев |
J=ml2 /12 |
|
|
15. |
Сила полезного сопротивления Р, Н |
2,5 |
|
|
16. |
Вес ползуна F,H |
12 |
|
ВВЕДЕНИЕ
Главной задачей выполнения данной курсовой работы является закрепление теоретических знаний, приобретенных при изучении курса “Механика”, приобретение практических навыков по конструированию и проектированию рычажных механизмов, распространенных в радиоэлектронных приборах и системах.
На стадии проектирования необходимо произвести анализ нагруженности механизма, рассчитать кинематические пары механизма на прочность и определить размеры и площадь сечения звеньев механизма.
1 Динамический анализ механизма
.
1.1. Структурный анализ механизма
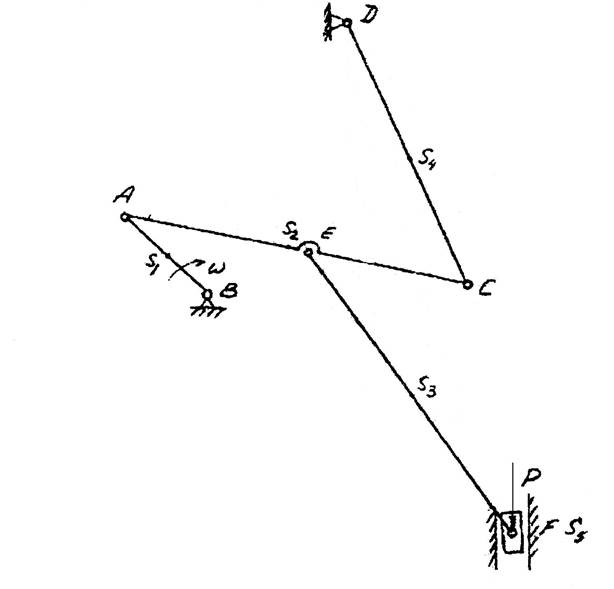
Рисунок 1.1.2. Схема механизма
1- кривошип;
2- коромысло;
3-шатун;
4- коромысло;
5-поршень;
6- стойка
1.1.3. Перечисление кинематических пар
Звенья механизма объединены в кинематические пары:
1-2-кинематическая пара 5-го класса, вращательная;
2-3-кинематическая пара 5-го класса, вращательная;
3-4-кинематическая пара 5-го класса, вращательная;
4-5-кинематическая пара 5-го класса, вращательная;
5-6-кинематическая пара 5-го класса, поступательная;
6-1-кинематическая пара 5-го класса, вращательная.
1.2 Кинематический анализ механизма
1.2.1. Определение скоростей точек и звеньев механизма.
Для определения скоростей точек и звеньев механизма применяем метод планов. Построение плана скоростей начинаем с ведущего звена BA механизма. Угловую скорость ведущего звена определяем по формуле:
wВА = p ![]() n / 30
(1.2.1)
n / 30
(1.2.1)
wВА = 3.14 ![]() 700 / 30 = 73,26 [ рад/с]
700 / 30 = 73,26 [ рад/с]
Угловая
скорость ведущего звена - величина постоянная, то скорость точки А
вычисляем по формуле: ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.