













Санкт-Петербургский государственный политехнический университет
Факультет технической кибернетики
Кафедра автоматики и вычислительной техники
по лабораторной работе №5-1
Исследование системы компьютерного управления с ПИД - регулятором
Выполнил студент гр. 4081/1 Волыхин А.Н.
Проверил: Ярмийчук В.Д.
Санкт-Петербург
2009
1. Цели работы
Цель работы - изучение алгоритмических способов и особенностей формирования
управляющих воздействий цифровыми ПИД-регуляторами.
2. Методика исследования
Уравнение ПИД - регулятора в непрерывной форме:  ,
,
где ![]() - рассогласование
управляемой координаты и уставки.
- рассогласование
управляемой координаты и уставки.
В дискретной форме:
![]() ,
,
где ![]() ,
, ![]()
![]() ,
, ![]() .
.
В рекуррентной форме:
![]() ,
,
где ![]() .
.
3. Проведение эксперимента
3.1. Коррекция постоянного сигнала
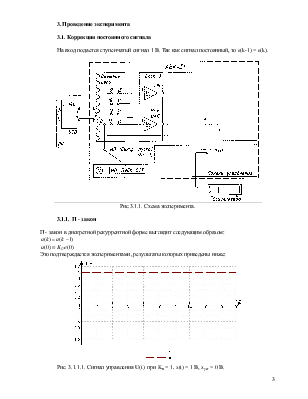
На вход подается ступенчатый сигнал 1 В. Так как сигнал постоянный, то e(k-1) = e(k).
Рис.3.1.1. Схема эксперимента.
3.1.1. П - закон
П - закон в дискретной рекуррентной форме выглядит следующим образом:
![]()
![]()
Это подтверждается экспериментами, результаты которых приведены ниже:
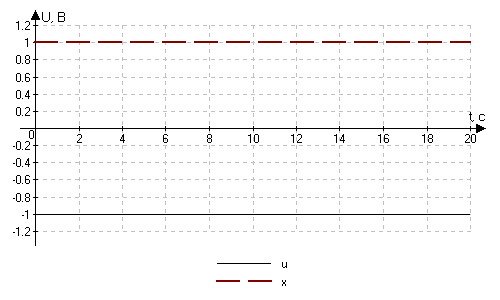
Рис. 3.1.1.1. Сигнал управления U(t) при Kп = 1, x(t) = 1 В, xуст = 0 В.
Таблица 3.1.1.1. Значения сигнала управления при различных значениях Kп.
|
Kп |
xуст, В |
x, В |
u, В |
|
1 |
0 |
1 |
-1 |
|
2 |
0 |
1 |
-2 |
|
3 |
0 |
1 |
-3 |
|
-1 |
0 |
1 |
1 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.