Таким образом, на большей части области определения управление подчиняется
пропорциональному закону с КП = КДД.
В начальный момент времени оно принимает значение ![]() .
.
Таким образом, увеличение Т0 приводит к увеличению продолжительности начального
импульса и изменению его величины.
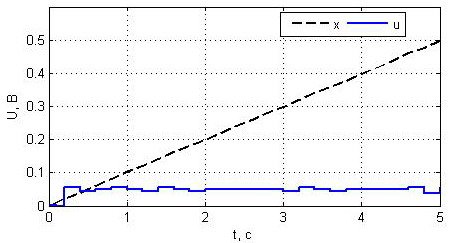
Рис. 3.2.3.1. Сигнал управления U(t) при Kд = 0,5, x(t) = 0,1*t В, xуст = 0 В, T0 = 200 мс.
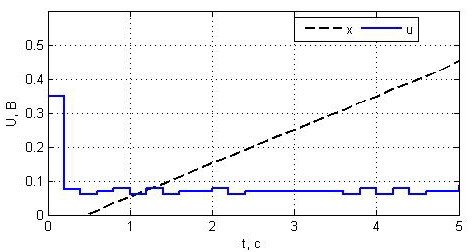
Рис. 3.2.3.2. Сигнал управления U(t) при Kд = 0,7, x(t) = 0,1*t В, xуст = 0,1 В, T0 = 200 мс.
3.2.4. ПИД-закон
![]()
![]()
По сути своей ПИД - закон представляет собой комбинацию трех вышеописанных законов. Причем на первом такте он ведет себя как Д - закон, на последующих – в соответствии
с И - законом, функция которого смещена пропорционально КП.
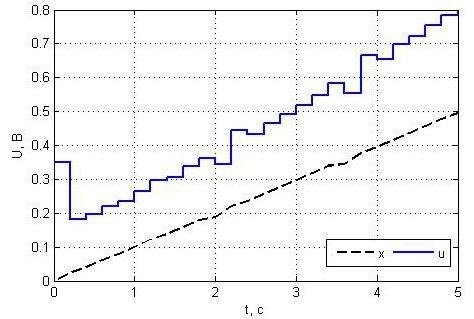
Рис. 3.2.4.1. Сигнал управления U(t) при Kп = 1, Kи = 0,1, Kд = 0,5,
x(t) = 0,1*t В, xуст = 0,1 В, T0 = 200 мс.
3.3. Исследование регулятора при подаче на его вход синусоидального сигнала.
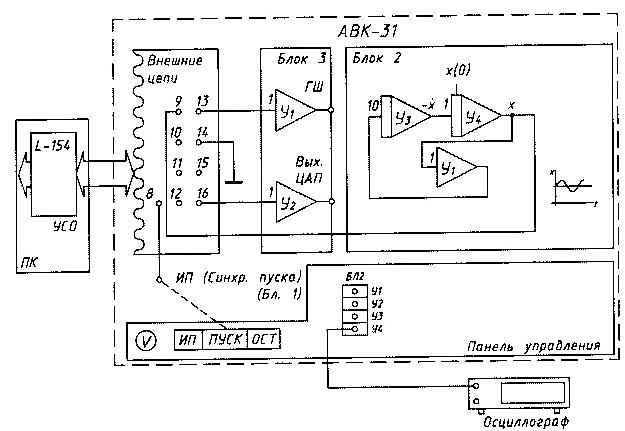
Рис. 3.3.1. Схема эксперимента.
3.3.1. П – закон
![]()
![]()
Из приведенных формул следует, что начальная величина управления зависит равно от Кп и хуст, а также что приращение управления есть приращение регулируемой величины
масштабированное с Кп. И то, и другое подтверждается приведенными графиками.
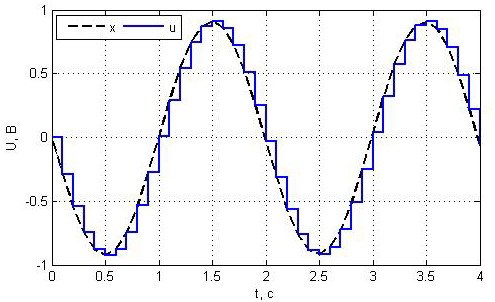
Рис. 3.3.1.1. Сигнал управления U(t) при Kп = 1, xуст = 0 В, T0 = 100 мс.
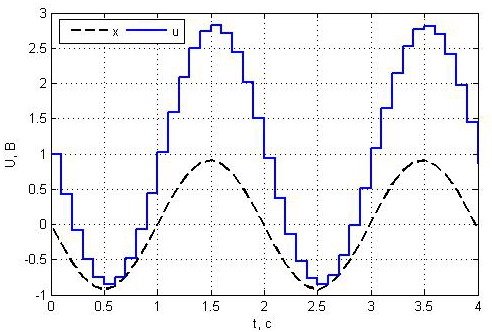
Рис. 3.3.1.2. Сигнал управления U(t) при Kп = 2, xуст = 0,5 В, T0 = 100 мс.
3.3.2. И - закон
![]()
![]()
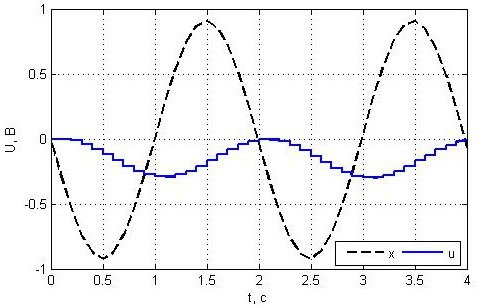
Рис. 3.3.2.1. Сигнал управления U(t) при Kи = 0,5, xуст = 0 В, T0 = 100 мс.
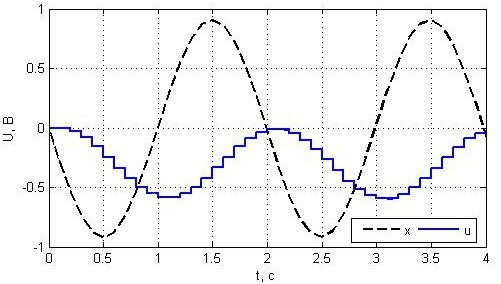
Рис. 3.3.2.2. Сигнал управления U(t) при Kи = 1, xуст = 0 В, T0 = 100 мс.
Приведенные результаты экспериментов подтверждают, во-первых, то, что начальное значение управления не зависит от параметров регулятора. Рис. 3.3.2.1 и 3.3.2.2 также наглядно демонстрируют, что величина управления пропорциональна интегралу х за время наблюдения и величине КИ.
3.3.3. Д-закон
![]()
![]()
Функция управления при Д - законе фактически представляет собой производную х,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.