взятую с коэффициентом КД. Она достигает максимума при x = 0, то есть
sin’x = x*cos(x)=1*3.14.
Величина начального импульса определяется КДД и хуст.
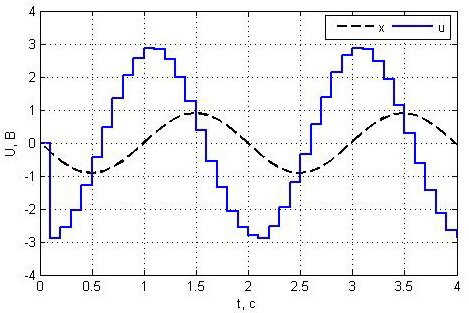
Рис. 3.3.3.1. Сигнал управления U(t) при Kд = 1, xуст = 0 В, T0 = 100 мс.
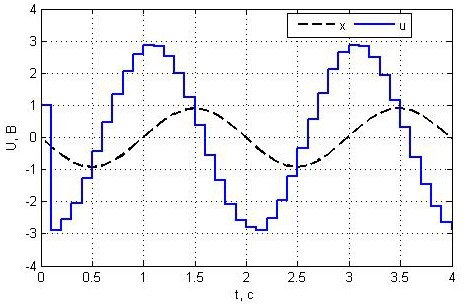
Рис. 3.3.3.2. Сигнал управления U(t) при Kд = 1, xуст = 1 В, T0 = 100 мс.
3.3.4. ПИД-закон
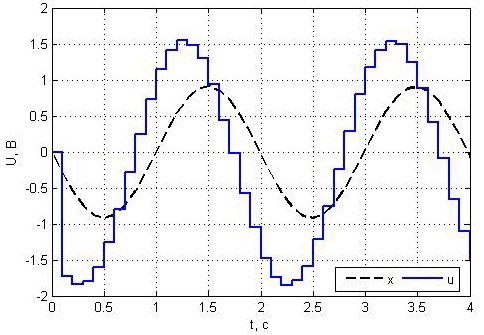
Рис. 3.3.4.1. Сигнал управления U(t) при Kп = 1, Kи = 0,5, Kд = 0,5, xуст = 0 В, T0 = 100 мс.
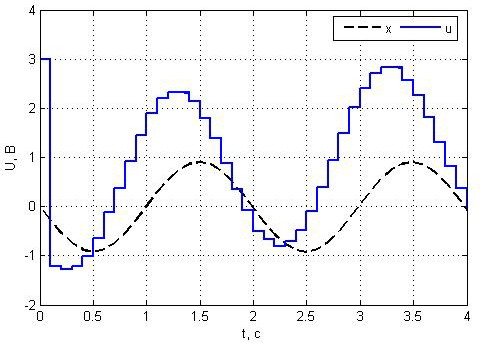
Рис. 3.3.4.2. Сигнал управления U(t) при Kп = 1, Kи = 0,5, Kд = 0,5, xуст = 0,5 В, T0 = 100 мс.
ПИД - закон управления является комбинацией всех трех методов, что можно наблюдать на рис. 3.3.4.1. Наличие интегральной составляющей и ненулевой уставки дает колебательный процесс, «ползущий» вверх. Наличие дифференциальной составляющей – начальный импульс. Пропорциональной – увеличение размаха колебаний.
Поясним рис. 3.3.4.2. На нем продемонстрировано отличие постоянно действующей
уставки и однократного начального смещения. Отличие состоит в том, что в этом случае
не наблюдается накопления ошибки, а значит и изменения диапазона колебаний управления.
4. Выводы
В ходе выполнения работы была рассмотрена работа типовых цифровых регуляторов при разных значениях параметров. Результаты, полученные в ходе экспериментов подтвердили теоретические расчеты и продемонстрировали отличие цифровых регуляторов от непрерывных.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.