Также отметим, что величина периода дискретизации T0 на результаты не влияет.
3.1.2. И - закон
И - закон в дискретной форме:
![]() ,
, ![]() .
.
Фактически, на каждом очередном такте происходит увеличение управления
на величину рассогласования на предыдущем шаге, приведенном
с коэффициентом ![]() .
.
Изменение ![]() приведет к тому,
что пропорционально
приведет к тому,
что пропорционально ![]() увеличивается приращение
увеличивается приращение
на очередном шаге. Соответственно, приращение на очередном шаге пропорционально
величине периода дискретизации.
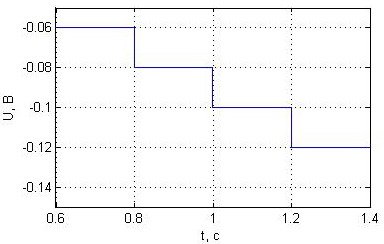
Рис. 3.1.2.1. Изменение сигнала управления во времени.
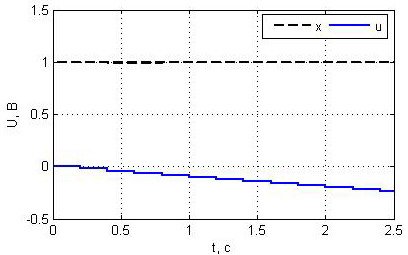
Рис. 3.1.2.2. Сигнал управления U(t) при Kи = 0,1, x(t) = 1 В, xуст = 0 В, T0 = 200 мс.
Таблица 3.1.2.1. Зависимость параметров управления от параметров регулятора.
|
Kи |
Т0, мс |
xуст, В |
x, В |
Δu, В |
|
0,1 |
200 |
0 |
1 |
-0,02 |
|
0,2 |
200 |
0 |
1 |
-0,04 |
|
-0,1 |
200 |
0 |
1 |
0,02 |
|
-0,1 |
100 |
0 |
1 |
0,01 |
3.1.3. Д - закон
Д-закон в дискретной форме:
![]()
![]()
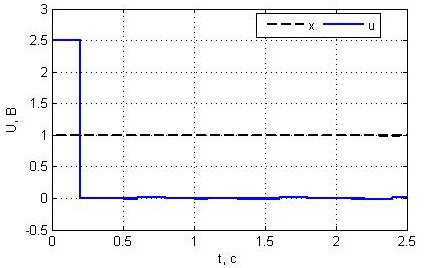
Рис. 3.1.3.1. Сигнал управления U(t) при Kд = -0,5, x(t) = 1 В, xуст = 0 В, T0 = 200 мс.
Таблица 3.1.3.1. Зависимость параметров управления от параметров регулятора.
|
Kд |
Т0, мс |
xуст, В |
x, В |
u0, В |
|
-0,5 |
200 |
0 |
1 |
2,5 |
|
0,7 |
200 |
0 |
1 |
-3,5 |
|
0,5 |
200 |
0 |
1 |
-2,5 |
|
0,5 |
150 |
0 |
1 |
-3,34 |
|
0,5 |
100 |
0 |
1 |
-5 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.