Увеличение периода дискретизации приводит к увеличению ширины δ - импульса,
соответственно уменьшается его величина. Точно также уменьшение КД приводит
к уменьшению величины импульса.
3.1.4. ПИД - закон
ПИД - закон в дискретной форме для постоянного сигнала:
![]()
![]()
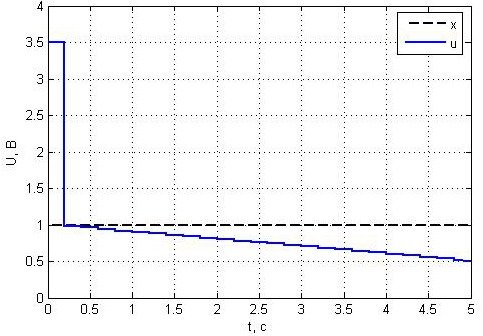
Рис. 3.1.4.1. Сигнал управления U(t) при Kп = 1, Kи = -0,1, Kд = 0,5,
x(t) = 1 В, xуст = 2 В, T0 = 200 мс.
Величина начального импульса определяется
значениями КД, xуст, КП
и Т0 согласно формуле ![]() .
.
Зависимость его от параметров носит такой же характер, как и для Д-закона.
Так для условий рис. 3.1.4.1 получаем ![]() =3,5 В, что полностью совпадает
=3,5 В, что полностью совпадает
с экспериментальным значением.
Наличие П - составляющей приводит к тому, что управление в целом оказывается
смещенным относительно 1 на величину Kпe(0).
Ступенчатое убывание управления, наблюдаемое начиная со второго такта, подчиняется тем же правилам, что и управление при И - законе.
3.2. Исследование регулятора при подаче на его вход линейно-возрастающего сигнала.
На вход подается линейно возрастающий сигнал. Так как величина его приращения
постоянна, то e(k) - e(k-1) = const.
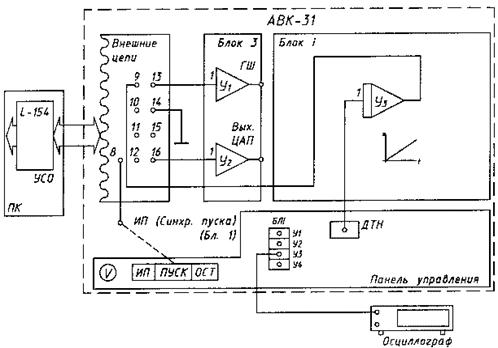
Рис. 3.2.1. Схема эксперимента.
3.2.1. П - закон
![]()
![]()
То есть на каждом такте управление повторяет значение х. Тогда приращение u на очередном шаге будет пропорционально периоду дискретизации T0. Также оно пропорционально величине КП. Наконец, величина начального смещения пропорциональна значению уставки.
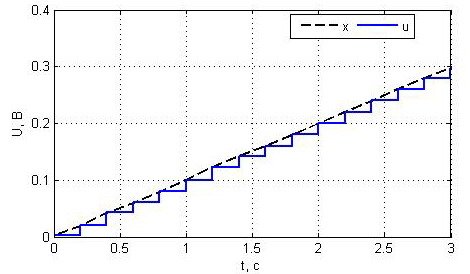
Рис. 3.2.1.1. Сигнал управления U(t) при Kп = 1, x(t) = 0,1*t В, xуст = 0 В, T0 = 200 мс.
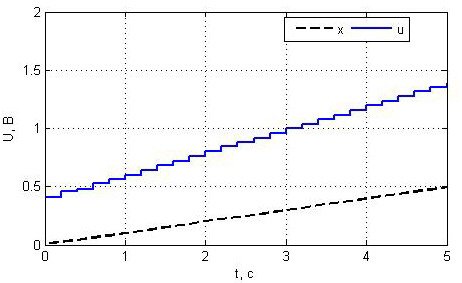
Рис. 3.2.1.2. Сигнал управления U(t) при Kп = 2, x(t) = 0,1*t В, xуст = 0,2 В, T0 = 200 мс.
3.2.2. И - закон
![]() ,
, ![]()
Так как хуст = const, а х(k-1) на каждом такте увеличивается, то приращение u на каждом такте увеличивается на Δх. То есть функция u(t) имеет положительную вторую производную.
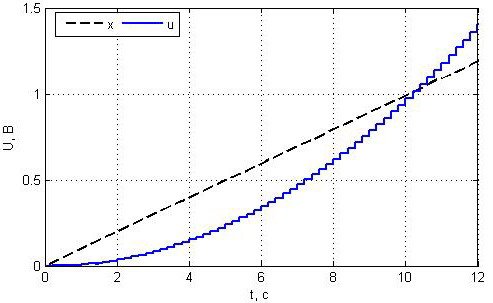
Рис. 3.2.2.1. Сигнал управления U(t) при Kи = 0,2, x(t) = 0,1*t В, xуст = 0 В, T0 = 200 мс.
Увеличение Т0 приводит к увеличению очередного приращения u, но не его абсолютного значения, в отличие от увеличения KИ. Также увеличение хуст приводит к увеличению приращения u пропорционально KИ.
3.2.3. Д-закон
![]()
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.