РАСЧЕТ ПАРАМЕТРОВ И ХАРАКТЕРИСТИК АСИНХРОННЫХ ДВИГАТЕЛЕЙ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Объектом исследования в настоящей лабораторной работе являются асинхронные двигатели с короткозамкнутым ротором (АДК).
Цель работы: изучение методов расчета параметров схемы замещения, параметров режима и пусковых характеристик АДК; исследование этих параметров для реальных АДК; закрепление навыков работы на ПЭВМ при расчетах по готовой программе.
АДК, благодаря своей простоте и надежности, являются наиболее распространенным промышленным потребителем электрической энергии. АДК подключаются к системе электроснабжения (СЭС) и используется в качестве привода промышленных механизмов.
Основными параметрами режима АДК являются: активная Р и реактивная Q мощности, потребляемые АДК из электрической сети, ток статорной обмотки I1, электромагнитный момент на валу АДК Мэ в установившемся режиме, равный моменту сопротивления механизма Ммех, частота вращения ротора АДК w, скольжение ротора АДК, равное
 (1)
(1)
где wс - синхронная частота вращения ротора АДК.
Схема замещения АДК представлена на рис.1. Параметрами схемы замещения являются R1, Xs1 - активное сопротивление и индуктивное сопротивление рассеяния статорной обмотки; R2, Xs2 - активное сопротивление и индуктивное сопротивление рассеяния обмотки ротора, приведенные к статорной обмотке; X12 - индуктивное сопротивление взаимоиндукции между обмотками статора и ротора.
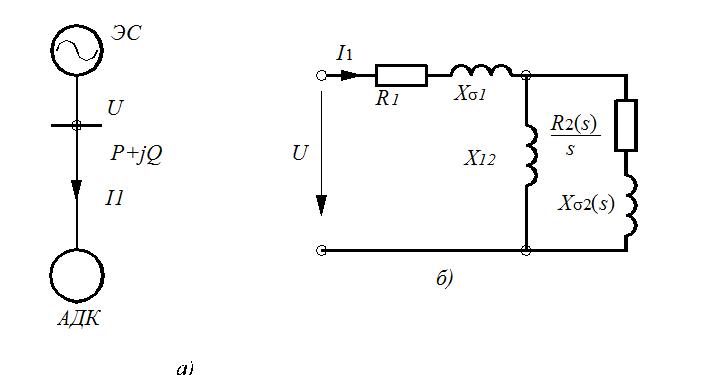
Рис.1. Схема подключения (а) и схема замещения (б) АДК
В схеме замещения АДК необходимо учитывать поверхностный эффект, т.е. вытеснение тока в обмотке ротора. Степень вытеснения тока определяется частотой наводимых в роторе токов, которая определяется скольжением двигателя.
Изменение сопротивлений эквивалентного обмотки ротора в схеме замещения за счет вытеснения тока хорошо описывается следующими зависимостями:
![]() (2)
(2)
 (3)
(3)
где R2п, Xs2п, R2c, Xs2с - активные и индуктивные сопротивления рассеяния обмотки ротора соответственно при пуске (s=1) и в синхронном режиме (s=0).
АДК характеризуется следующими каталожными данными:
Pн - номинальная мощность на валу двигателя, кВт;
Uн - номинальное напряжение, кВ;
cosjн - номинальный коэффициент мощности;
hн - номинальный коэффициент полезного действия, % ;
wн, wс - номинальная и синхронная частота вращения, об/мин;
Mп - кратность пускового (при s=1) момента;
Мм - кратность максимального момента;
Iп - кратность пускового тока.
Параметры схемы замещения и режима АДК удобно выражать в относительных единицах при следующих базисных условиях:
Sб=Sн - номинальная полная мощность АДК;
Uб=Uн - номинальное напряжение статорной обмотки АДК;
Mэ - электромагнитный момент (в виде исключения) целесообразно выражать в долях от номинального момента.
Основные параметрами режима АДК могут быть определены через параметры схемы замещения и скольжение по следующим выражениям:
 (4)
(4)
где ![]() - сопротивление,
сопряженное комплексному входному сопротивлению схемы замещения АДК в
соответствии со схемой замещения (рис.1) равное:
- сопротивление,
сопряженное комплексному входному сопротивлению схемы замещения АДК в
соответствии со схемой замещения (рис.1) равное:
 (5)
(5)
Sн - номинальная полная мощность АДК, равная
 (6)
(6)
Зависимости от скольжения P(s), Q(s), I(s), M(s) при номинальном напряжении на выводах двигателя называются пусковыми характеристиками АДК.
Основными расчетными параметрами АДК также являются:
синхронное индуктивное сопротивление АДК
Xc= Xs1+X12 (7)
сверхпереходное индуктивное сопротивление АДК
 (8)
(8)
электромагнитная постоянная времени обмотки ротора при короткозамкнутой статорной обмотке
 (9)
(9)
где X2’ - индуктивное сопротивление обмотки ротора при короткозамкнутой статорной обмотке
 (10)
(10)
Расчетные параметры АДК X” и Т2’ зависят от скольжения в связи с вытеснением тока в обмотке ротора.
Параметрами схемы замещения являются следующие параметры: R1, R2п , R2c, Xs1, X12, Xs2п, Xs2с. Их необходимо определить через каталожные данные АДК. Активное сопротивление статорной обмотки можно определить, исходя из потерь мощности в этой обмотке в номинальном режиме. В относительных единицах R1=DPст.
Для АДК потери в статорной обмотке составляют относительно устойчивую долю (в среднем 0.3) от общих потерь активной мощности в номинальном режиме, поэтому
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.