Основным требованием к алгоритму является соответствие расчетных параметров схемы замещения СД каталожным данным, т.е. параметры режима, соответствующие каталожным данным (например, Мп, Мв, Мм, Iп), но вычисленные через параметры схемы замещения, должны равняться этим каталожным данным.
Активное сопротивление статорной обмотки в относительных единицах равно потерям активной мощности в этой обмотке в номинальном режиме СД, которые составляют устойчивую долю (в среднем 0.25) от суммарных потерь активной мощности в СД:
Rст= 0.25(1-hн)hн cosjн (9)
Основным расчетным выражением для определения синхронного сопротивления Xd может служить выражение для максимального синхронного момента:
 (10)
(10)
где Pм - максимальная активная мощность в синхронном режиме СД;
Sн - номинальная полная мощность СД, равная
 (11)
(11)
Xdн - синхронное сопротивление в номинальном режиме СД, с учетом насыщения стали, соответствующего этому режиму (Xd = 1.11 Xdн - ненасыщенное синхронное сопротивление);
Еqн - номинальная синхронная ЭДС СД, определяемая выражением:
 (12)
(12)
Из выражения (10) с учетом соотношения (12) может быть получено ненасыщенное значение синхронного сопротивления Xd:
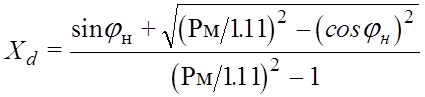 (13)
(13)
Остальные параметры схемы замещения СДМР определяются по методу последовательных приближений из условия совпадения одноименных каталожных и расчетных данных.
Сверхпереходное сопротивление X”dп целесообразно выразить в виде итерационного соотношения через пусковой ток:
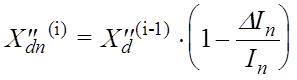 (14)
(14)
где X”d(i) и X”d(i-1)
- значения сопротивления X”d на i-м и (i-1)-ом шагах
процесса последовательных приближений; ![]() Iп
- разность между каталожным Iп и расчетным Iп1
значениями пускового тока на очередном шаге приближения:
Iп
- разность между каталожным Iп и расчетным Iп1
значениями пускового тока на очередном шаге приближения:
![]() (15)
(15)
Расчетное значение пускового тока Iп1 определяется по соотношениям (7), (8) при скольжении s=1.
Активное сопротивление эквивалентного демпферного контура СДМР в пусковом режиме R1п целесообразно выразить в виде итерационного соотношений через пусковой момент:
 (16)
(16)
где DМп - разность между каталожным Мп и расчетным Мп1 значениями пускового момента на очередном шаге приближения:
DМп = Мп – Мп1 (17)
Расчетный пусковой момент Мп определяется по соотношениям (7), (8) при скольжении s=1.
Активное сопротивление эквивалентного демпферного контура СДМР в синхронном режиме R1с целесообразно выразить в виде итерационного соотношений через входной момент:
 (18)
(18)
где DМв - разность между каталожным Мв и расчетным Мв1 значениями входного момента на очередном шаге приближения:
DМв = Мв – Мв1 (19)
Расчетный входной момент Мв1 определяются по соотношениям (7), (8) при скольжении s=0.05.
Остальные параметры схемы замещения выражаются либо через приближенные соотношения, отражающие устойчивые закономерности СДМР, либо через найденные обобщенные параметры.
Индуктивное сопротивление рассеяния эквивалентного демпферного контура в пусковом режиме Xs1п составляет устойчивую долю (в среднем 0.55) от активного сопротивления R1п (это следует из теории массивного ротора), поэтому:
Xs1п = 0.55 R1п (20)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.