Формулы (4.2)...(4.4) можно использовать для расчета нагрузочных соотношений выходных буферов данных микросхем памяти (см. рис.3.3), только вместо параметров I0вых.мп, I1вых.мп, Cдоп.мп использовать соответствующие параметры ОЗУ RАМ: I0вых.ram, I1вых.ram, Cдоп.ram.
4.4. Расчет временных соотношений
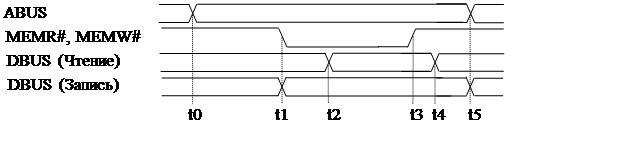
Расчет временных соотношений также является одним из этапов проектирования МПС (см. п. 4.1). Отдельно рассмотрим временные соотношения при вводе и выводе данных на основании обобщенных временных диаграмм (см. рис. 4.3), которые получены с использованием рисунков 2.3...2.7.
|
|
Рис. 4.3. Обобщенные временные диаграммы циклов чтения/записи
Предварительно определим параметры сигналов, которые формируются МП в предположении t0 = 0:
t1 = 2 / fbq, (4.5)
t3 = t1 + trd = (5 + 2 * N) / fbq, (4.6)
t3...5 = t5 - t3 = 1 / fbq, (4.7)
где t1 - момент формирования среза импульса MEMR#/MEMW# (см. рисунки 2.3...2.7);
trd - длительность импульса чтения (записи), определяется формулой (2.1); t3...5 - длительность удержания данных после фронта сигнала MEMW#.
Для проверки согласования временных параметров МП и ОЗУ (ПЗУ) в циклах чтения определим по справочнику следующие параметры
ОЗУ (ПЗУ): tsu(a-d) - время установления данных относительно адреса; tsu(cs-d) - время установления данных относительно сигнала выбора микросхемы (CS#, см. рис. 3.3) и tsu(oe-d) - время установления данных относительно сигнала разрешения выхода (ОЕ#, см. рис. 3.3).
Для надежного чтения в РОН МП необходимо, чтобы время предустановки данных считываемых из ОЗУ (ПЗУ, см. промежуток времени t2...t3 на рис. 4.3) было больше допустимой для МП величины tsu(d-memr), которая приводится в справочных данных МП. Т.е. для надежного считывания должно выполняться условие:
t2...3 = t3 - t2 > tsu(d-memr) (4.8)
В выражении (4.8) момент времени t3 определяется формулой (4.6), а момент времени t2 - формулой:
t2 = Max{td.a, td.cs, td.oe}, (4.9)
где: td.a - задержка читаемых данных относительно адреса; td.cs - задержка читаемых данных относительно сигнала выбора микросхемы; td.oe - задержка читаемых данных относительно сигнала разрешения выхода.
Задержка читаемых данных относительно адреса td.a определяется формулой:
td.a = tba + tbd1 + tbd2 + tsu(a-d), (4.10)
где: tba - задержка в адресном буфере МП (см. BF1 на рис. 3.2), если он имеется; tbd1 - задержка в буфере данных МП (см. BF2 на рис. 3.2), если он имеется; tbd2 - задержка в буфере данных ОЗУ (см. BF на рис. 3.3), если он имеется; tsu(a-d) - справочное данное ОЗУ (ПЗУ).
Задержка читаемых данных относительно сигнала выбора микросхемы td.cs определяется формулой:
td.cs = tba + tbd1 + tbd2 + tdc + tsu(cs-d), (4.11)
где: tdc - задержка в селекторе адреса (DC на рис. 3.3); tsu(cs-d) - справочное данное ОЗУ (ПЗУ).
Задержка читаемых данных относительно сигнала разрешения выхода td.oe определяется формулой:
td.oe = tba + tbd1 + tbd2 + t1 + tsu(oe-d), (4.12)
где: t1 определяется формулой (4.5); tsu(oe-d) - справочное данное ОЗУ (ПЗУ).
Если неравенство (4.8) удовлетворяется при N = 0, то квитирующее устройство не нужно, в противном случае значение N является исходным данным при проектировании квитирующего устройства.
Полная методика расчета согласования временных параметров МП и ОЗУ приведена в [9] (см. с.203). Ниже приводится несколько упрощенная методика проведения таких расчетов, требующая знания следующих справочных параметров ОЗУ: tsu(a-memw) - допустимая задержка среза сигнала MEMW# относительно адреса; twr - длительность сигнала MEMW#, th(memw-d) - время сохранения данных относительно фронта сигнала MEMW#.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.