








10. ПЛАНЕТАРНЫЕ ПЕРЕДПЧИ
10.1. Основные сведения
При проектировании многих машин возникает необходимость осуществлять передачу вращательного движения с большим передаточным отношением. В данном случае применяют планетарные зубчатые передачи, т.к. использование рядовых зубчатых передач приводит к большим габаритам машин. Именно благодаря компактности и малому весу по сравнению с рядовыми зубчатыми передачами планетарные передачи нашли широкое применение в машиностроении.
Планетарная зубчатая передача – это механизм, содержащий зубчатые колеса с перемещающимися в пространстве осями вращения.
Зубчатые колеса с неподвижными осями вращения называют центральными зубчатыми колесами. Зубчатые колеса с подвижными осями вращения называют сателлитами. Звено, в котором располагаются оси сателлитов, называют водилом. Простейшие схемы планетарных передач приведены в табл. 10.1.
Планетарные передачи подразделяются на планетарные
механизмы с одной степенью свободы (![]() ) и
одним опорным звеном (неподвижным центральным колесом) и дифференциальные
механизмы с двумя и более степенями свободы (
) и
одним опорным звеном (неподвижным центральным колесом) и дифференциальные
механизмы с двумя и более степенями свободы (![]() ), не
имеющие опорного звена.
), не
имеющие опорного звена.
Обычно в планетарных передачах имеется несколько
симметрично расположенных сателлитов ![]() . Их вводят с целью
снижения усилий в зацеплении, разгрузки опор центральных колес, уменьшения
габаритов передачи, улучшения уравновешивания водила. С другой стороны с
увеличением числа сателлитов увеличивается неравномерность распределения
нагрузки по параллельным потокам мощности. Это, в свою очередь, требует
повышенной точности изготовления и сборки передачи либо применение плавающей
подвески центральных колес.
. Их вводят с целью
снижения усилий в зацеплении, разгрузки опор центральных колес, уменьшения
габаритов передачи, улучшения уравновешивания водила. С другой стороны с
увеличением числа сателлитов увеличивается неравномерность распределения
нагрузки по параллельным потокам мощности. Это, в свою очередь, требует
повышенной точности изготовления и сборки передачи либо применение плавающей
подвески центральных колес.
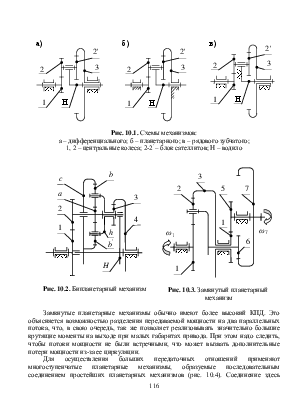
Любой планетарный механизм можно превратить в дифференциальный механизм, если освободить неподвижное (опорное) колесо и сообщить ему вращение. Наоборот, дифференциальный механизм можно превратить в планетарный механизм, если закрепить одно из его центральных колес (рис. 10.1). Это свойство обратимости позволяет применять одни и те же методы проектирования планетарных и дифференциальных механизмов.
Развитие структуры планетарных механизмов в радиальном направлении приводит к образованию бипланетарных механизмов (рис. 10.2). Данные механизмы состоят из основного планетарного механизма, образованного звеньями 1, 2, Н, 4, и сателлитного планетарного механизма, состоящего из звеньев a, b, c, 3 – h.
Если два соосных вала зубчатого дифференциала
соединяются (замыкаются) с ведущим или ведомым валом через какую-либо передачу
(простую зубчатую или планетарную), то получается замкнутый дифференциальный
механизм (рис. 10.3). Такой механизм получается, если в однорядном
дифференциале с тремя вращающимися соосными валами замкнуть звенья 3 и Н
через зубчатую передачу, состоящую из двух пар колес 4-5 и 6-7.
Тогда ведомое звено 7 получает вращение от звена 3 через колеса 4-5
и параллельно от звена Н через пару колес 6-7. Полученный механизм имеет
одну степень свободы (![]() ).
).
|
|
|
|
Рис. 10.1. Схемы механизмов:
а – дифференциального; б – планетарного; в – рядового зубчатого;
1, 2 – центральные колеса; 2-2' – блок сателлитов; Н – водило
|
Рис. 10.2. Бипланетарный механизм |
Рис. 10.3. Замкнутый планетарный механизм |
Замкнутые планетарные механизмы обычно имеют более высокий КПД. Это объясняется возможностью разделения передаваемой мощности на два параллельных потока, что, в свою очередь, так же позволяет реализовывать значительно большие крутящие моменты на выходе при малых габаритах привода. При этом надо следить, чтобы потоки мощности не были встречными, что может вызвать дополнительные потери мощности из-за ее циркуляции.
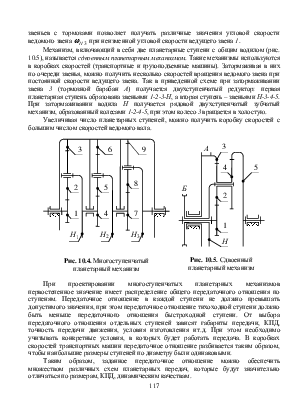
Для осуществления больших передаточных отношений
применяют многоступенчатые планетарные механизмы, образуемые последовательным
соединением простейших планетарных механизмов (рис. 10.4). Соединение здесь
звеньев с тормозами позволяет получать различные значения угловой скорости
ведомого звена ![]() при неизменной угловой скорости
ведущего звена 1.
при неизменной угловой скорости
ведущего звена 1.
Механизм, включающий в себя две планетарные ступени с общим водилом (рис. 10.5), называется сдвоенным планетарным механизмом. Такие механизмы используются в коробках скоростей (транспортные и грузоподъемные машины). Затормаживая в них по очереди звенья, можно получить несколько скоростей вращения ведомого звена при постоянной скорости ведущего звена. Так в приведенной схеме при затормаживании звена 3 (тормозной барабан А) получается двухступенчатый редуктор: первая планетарная ступень образована звеньями 1-2-3-Н, а вторая ступень – звеньями Н-3-4-5. При затормаживании водила Н получается рядовой двухступенчатый зубчатый механизм, образованный колесами 1-2-4-5, при этом колесо 3 вращается в холостую.
Увеличивая число планетарных ступеней, можно получить коробку скоростей с большим числом скоростей ведомого вала.
|
Рис. 10.4. Многоступенчатый планетарный механизм |
Рис. 10.5. Сдвоенный планетарный механизм |
При проектировании многоступенчатых планетарных механизмов первостепенное значение имеет распределение общего передаточного отношения по ступеням. Передаточное отношение в каждой ступени не должно превышать допустимого значения, при этом передаточное отношение тихоходной ступени должно быть меньше передаточного отношения быстроходной ступени. От выбора передаточного отношения отдельных ступеней зависят габариты передачи, КПД, точность передачи движения, условия изготовления ит.д. При этом необходимо учитывать конкретные условия, в которых будет работать передача. В коробках скоростей транспортных машин передаточное отношение разбивается таким образом, чтобы наибольшие размеры ступеней по диаметру были одинаковыми.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.