Вычисление ![]() происходит с помощью
преобразователя координат ПК1 (u, v, w ® a, b ® 1, 2), используя сигналы
происходит с помощью
преобразователя координат ПК1 (u, v, w ® a, b ® 1, 2), используя сигналы ![]() . Сигнал
. Сигнал ![]() используется для замыкания обратной связи по полю
двигателя (ПИ-регулятор составляющей потокосцепления ротора по оси 1). Сигнал
используется для замыкания обратной связи по полю
двигателя (ПИ-регулятор составляющей потокосцепления ротора по оси 1). Сигнал ![]() сводится к нулю ПИ-регулятором
составляющей потокосцепления ротора по оси 2. Задание на регуляторе является
нулевым. Обратная связь составляющей потокосцепления ротора по оси 2 поступает
с преобразователя координат. Сигнал выхода регулятора пропорционален скорости
ротора, который используется для замыкания обратной связи контура регулирования
скорости ротора.
сводится к нулю ПИ-регулятором
составляющей потокосцепления ротора по оси 2. Задание на регуляторе является
нулевым. Обратная связь составляющей потокосцепления ротора по оси 2 поступает
с преобразователя координат. Сигнал выхода регулятора пропорционален скорости
ротора, который используется для замыкания обратной связи контура регулирования
скорости ротора.
Для осуществления
координатных преобразований необходимо знать частоту вращения поля статора (![]() ), а точнее ее
тригонометрические функции. Для этого суммируют вычисленную частоту ротора (
), а точнее ее
тригонометрические функции. Для этого суммируют вычисленную частоту ротора (![]() ) и частоту скольжения (
) и частоту скольжения (![]() ). Для упрощения вычисления
частоты скольжения используем пропорциональность составляющей тока статора по
оси 2 и скольжение двигателя. Введение коэффициента пропорциональности назовем
компенсацией скольжения (ks).
). Для упрощения вычисления
частоты скольжения используем пропорциональность составляющей тока статора по
оси 2 и скольжение двигателя. Введение коэффициента пропорциональности назовем
компенсацией скольжения (ks).
Компенсация скольжения:
Полученный сигнал wс подается на преобразователь напряжение-частота (ПНЧ) и функциональный преобразователь ослабления поля. Частота выхода ПНЧ интегрируется, получая из линейной частоты угловую, и преобразуется с помощью дешифратора в тригонометрические функции (sin и cos), которые используются для координатных преобразований.
Преобразователь координат ПК2 (1, 2 ® a, b ® u, v, w):
 .
.
Преобразователь координат
ПК1 (u, v, w ® a, b ® 1,
2) при условии ![]() :
:
 .
.
 |
Рис.13. Функциональная схеме системы управления
6.3.Выбор конкретного электропривода и его характеристики
Исходя из вышесказанного, предлагается управлять скоростью асинхронного электродвигателя с помощью частотно-регулируемого электропривода ИРБИ83 [13] с Рн=1,5 кВТ, Iн=5 А. Электроприводы ИРБИ8 предназначены для общепромышленного применения и обеспечивают регулирование частоты вращения асинхронных или других электродвигателей мощностью до 315 кВт в диапазоне частот от 1 до 100 Гц. Электроприводы могут работать в режиме стабилизации частоты вращения при изменении нагрузки или стабилизации нагрузки путем изменения частоты вращения. Механические характеристики ИРБИ83 приведены на рис..
Несмотря на то, что в диапазоне от 50 до 100 Гц момент электропривода не остается постоянным, электропривод ИРБИ подходит для замены, так как в диапазоне от 50 до 100 Гц происходит только быстрый подвод инструмента. Рабочие подачи осуществляются с меньшей скоростью.
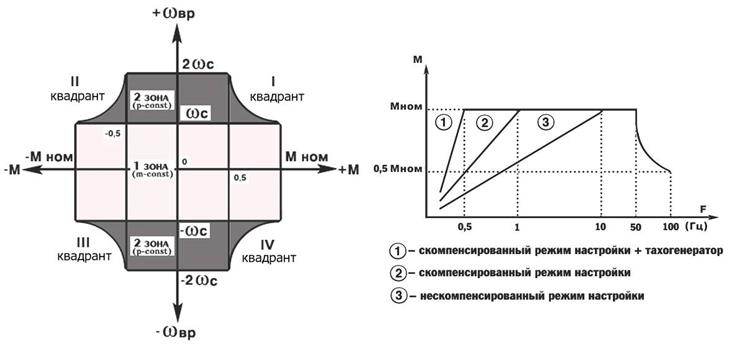
Рис.14. Механические характеристики электропривода
6.4.Функциональная схема станции управления
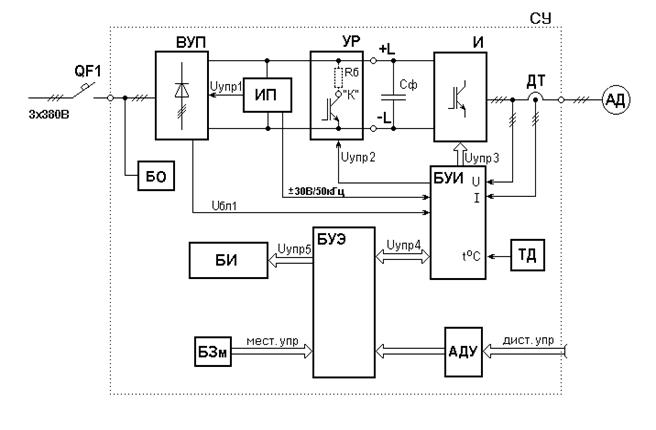
Рис.15. Функциональная схема СУ
Блок охлаждения (БО) предназначен для предотвращения перегрева охладителя силовых элементов выпрямителя и транзисторного инвертора. Питание блока охлаждения - от сетевого напряжения.
Блок выпрямителя с устройством предзаряда силового фильтра (ВУП) предназначен для выпрямления трех фаз сетевого напряжения и первоначального ограничения тока заряда силового конденсаторного фильтра Сф при включении электропривода. Цепь предзаряда шунтируется по сигналу Uупр1 блокировки режима предзаряда, который формируется в блоке источника питания (ИП).
Сигнал блокировки Uбл1 передается в блок управления инвертором (БУИ) через оптопару, выключенное состояние которой определяет аварийную ситуацию.
Блок силового конденсаторного фильтра (Сф) предназначен для компенсации индуктивности подводящей сети и фильтрации напряжения звена постоянного тока шин +L, -L, что необходимо для нормальной работы блока ИП и блока И.
Трехфазный транзисторный инвертор (И) напряжения предназначен для преобразования напряжения звена постоянного тока (шин +L, -L) в трехфазную систему синусоидальных напряжений, сдвинутых на 120 эл. град. между собой, регулируемых по амплитуде и частоте огибающей. Преобразование производится методом широтно-импульсной модуляции на несущей частоте 2...5 кГц. Блок состоит из шести транзисторных ключей, которые управляются по шине управления от блока управления инвертором (БУИ) сигналами Uупр3.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.