Так как Mmax =0,113 Нм<4,3Нм=2,2*1,94Нм=λ*Мн
то по перегрузочной способности двигатель выбран верно.
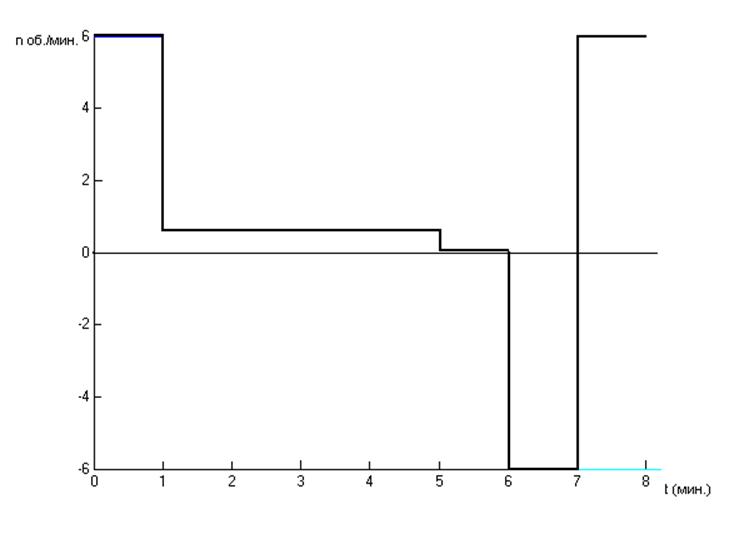
Рис. 6.
![]()
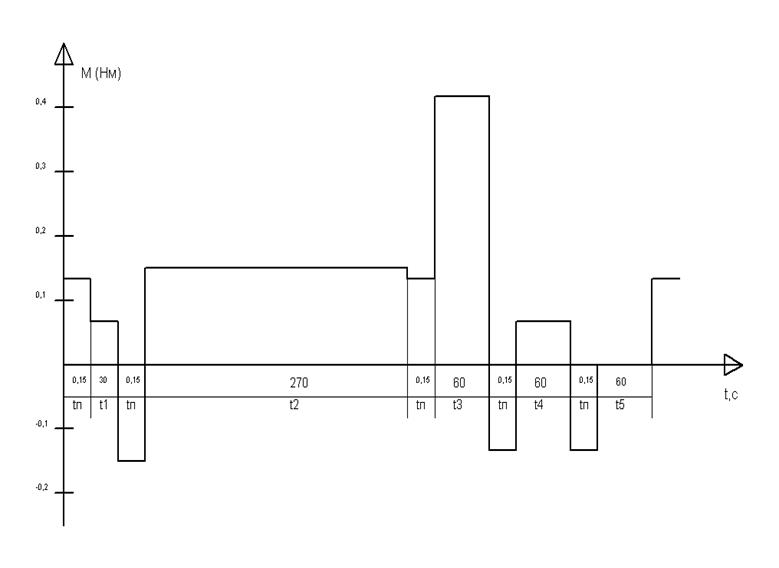
Рис.7
4.1.Механическая статическая характеристика асинхронного электродвигателя
Для построения механической характеристики электродвигателя необходимо рассчитать следующие параметры:
Номинальный момент электродвигателя:
Скорость идеального холостого хода:

Критическое скольжение определяется по формуле:

Критический момент определяется по формуле:
![]()
Механическую характеристику строим согласно выражению:
Механическая характеристика электродвигателя представлена на рис..
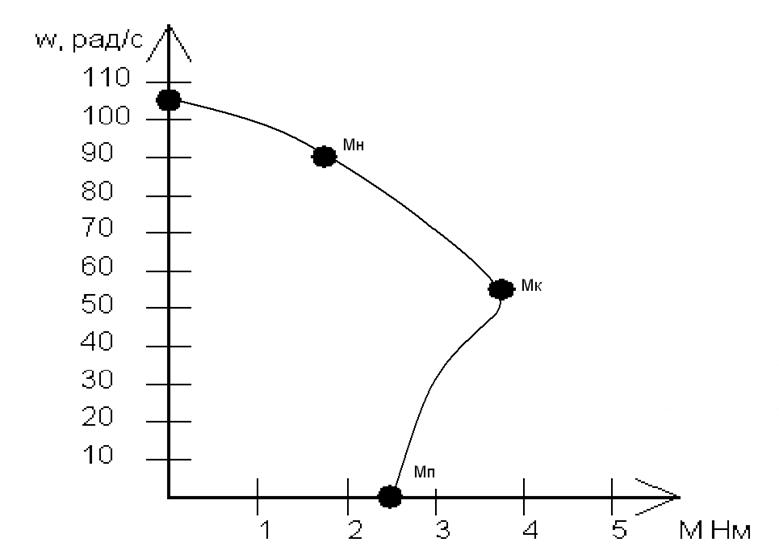
Рис.8.
5.Выбор элементов системы автоматического управления
5.1.Измерительный преобразователь мощности
Измерительный преобразователь тока (ИПТ) содержит измерительный элемент и две подключаемые к нему цепочки. Цепочки состоят из распределительных ключей РК1 и РК2, интеграторов И1 и И2, ключей передачи КП1 и КП2 и ключей сброса КС1 и КС2. Во вторую цепочку между разделительным ключом РК2 и интегратором И2 включён инвертор (-1). Непосредственное измерение мощности резания невозможно, поэтому для её оценки измеряют мощность, потребляемую ДГД, с учётом потерь мощности в двигателе и передачах станка. Применение в качестве ДГД асинхронных эл. двигателей с КЗ ротором требует получения сигнала управления пропорционального активной мощности, потребляемой ими из сети. Датчики вырабатывающие эти сигналы строятся на самых различных способах: векторного суммирования напряжения, использование нелинейных функциональных элементов, применения время-импульсной модуляции и амплитудной модуляции (ВИМ-АМ), а также ШИМ.
В качестве примера
рассмотрим устройство и работу измерительного преобразователя активного тока,
разработанного в ОСВД НГТУ. Очевидно, что при ![]()
![]() ; при
; при ![]() для
получения
для
получения ![]() необходимо полученный сигнал умножить на
необходимо полученный сигнал умножить на ![]() .
.
Активная составляющая переменного тока, как известно, определяется выражением:
где ![]() – амплитуда тока;
– амплитуда тока;
![]() –
угол, на который ток отстаёт по фазе от создающего его напряжения.
–
угол, на который ток отстаёт по фазе от создающего его напряжения.
Это выражение получается
при интегрировании полного тока в интервале от 0 до ![]() :
:

Отсюда следует, что, интегрируя мгновенные значения полного тока при положительной или отрицательной полуволне создающего его напряжения, получим активную составляющую тока.
Функциональная схема датчика активной мощности приведено на Рис.9.
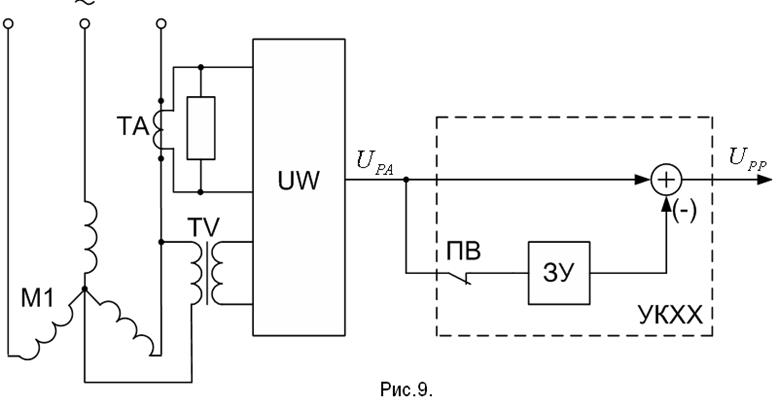
где ТА и TV – трансформаторы тока и напряжения,
М1 – двигатель главного движения,
UW – измеритель мощности (активной),
УКХХ – устройство компенсации мощности холостого хода,
ЗУ – запоминающее устройство,
ПВ – путевой выключатель,
![]() и
и
![]() – напряжение, пропорциональные активной
мощности и мощности резания.
– напряжение, пропорциональные активной
мощности и мощности резания.
Функциональная схема измерительного преобразователя активного тока, являющегося частью UW и диаграмма его элементов приведена на Рис.10.
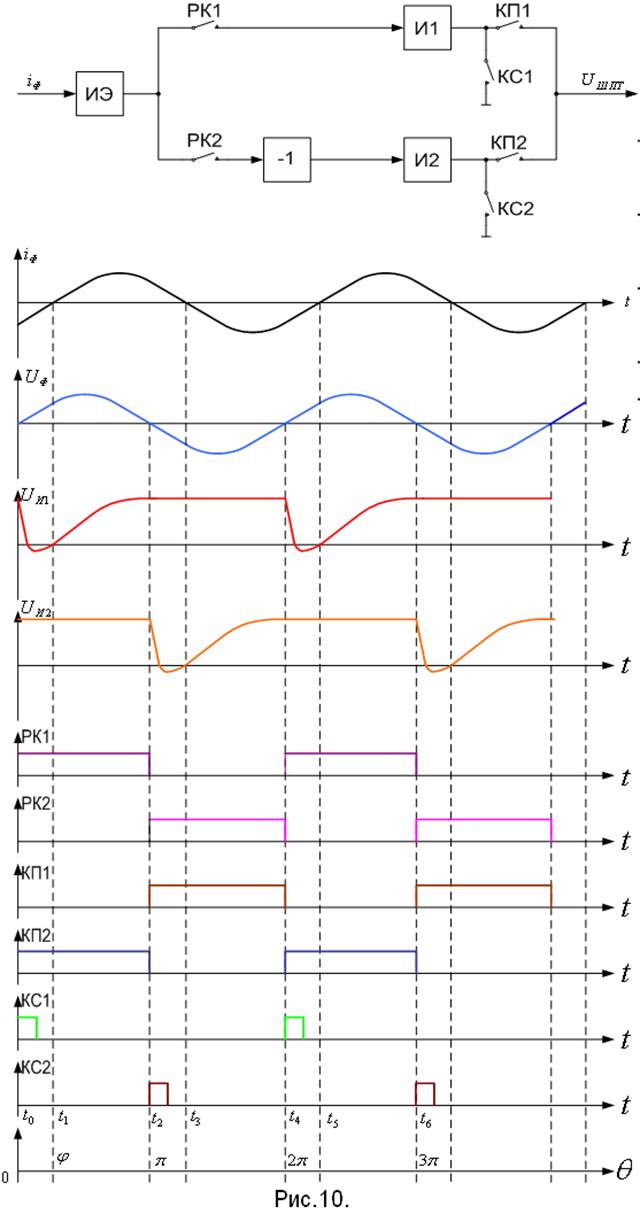
Во время действия
положительной полуволны напряжения ![]() (интервал времени
(интервал времени ![]() ). Разделительный ключ РК1 и ключ передачи
КП2 замкнуты, а РК2 и КП1 - разомкнуты. Поэтому на интервале времени
). Разделительный ключ РК1 и ключ передачи
КП2 замкнуты, а РК2 и КП1 - разомкнуты. Поэтому на интервале времени ![]() входной сигнал
входной сигнал ![]() воспринимается
интегратором И1 первого канала, приведённым на предшествующем интервале времени
воспринимается
интегратором И1 первого канала, приведённым на предшествующем интервале времени
![]() к нулевым начальным условиям ключом
сброса КС1, а информация, накопленная интегратором И2 второго канала через
разомкнутый ключ КП2 поступает на выход ИПТ.
к нулевым начальным условиям ключом
сброса КС1, а информация, накопленная интегратором И2 второго канала через
разомкнутый ключ КП2 поступает на выход ИПТ.
Во время действия
отрицательной полуволны напряжения ![]() (интервал времени
(интервал времени ![]() ) замкнуты распределительный ключ РК2 и
ключ передачи КП1, а РК1 и КП2 - разомкнуты. Входной сигнал
) замкнуты распределительный ключ РК2 и
ключ передачи КП1, а РК1 и КП2 - разомкнуты. Входной сигнал ![]() , пройдя через инвертор (-1) на интервале
, пройдя через инвертор (-1) на интервале ![]() воспринимается интегратором И2 второго
канала, который предварительно на интервале
воспринимается интегратором И2 второго
канала, который предварительно на интервале ![]() был
приведён к нулевым начальным условиям замыканием ключа КС2, а информация,
накопленной интегратором И1 через замкнутый ключ передачи КП1 передаётся на
выход ИПТ.
был
приведён к нулевым начальным условиям замыканием ключа КС2, а информация,
накопленной интегратором И1 через замкнутый ключ передачи КП1 передаётся на
выход ИПТ.
Благодаря наличию инвертора (-1) выходной сигнал ИЭ во время действия отрицательной полуволны инвертируется, и интеграторы работают в одинаковых условиях.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.