Рассмотрим метод Зиновьева (метод замкнутых векторных контуров).
Алгоритм метода.
1. Проводим структурный анализ механизма.
2. Рисуем в любом промежуточном положении механизм, его кинематическую схему.
3. Рисуем координатную систему – обычно начало координат связывают со стойкой.
4.
 |
5. Все векторы объединяем в замкнутые контуры. Контуры образованы таким образом, чтобы в них входило не более двух неизвестных.
6. Записываем векторные уравнения замкнутости контуров.
7. Записываем проекции этих векторных уравнений на координатные оси.
8. Последовательно (начиная от первого, включающего начальное звено) решаем полученное уравнение при этом находим координаты положений интересующих нас точек.
9. Дифференцируем по времени или по обобщенной координате, получаем ранее уравнения.
10. Решаем полученную систему уравнений, находим скорости интересующих нас точек. Аналогично находим ускорения (…).
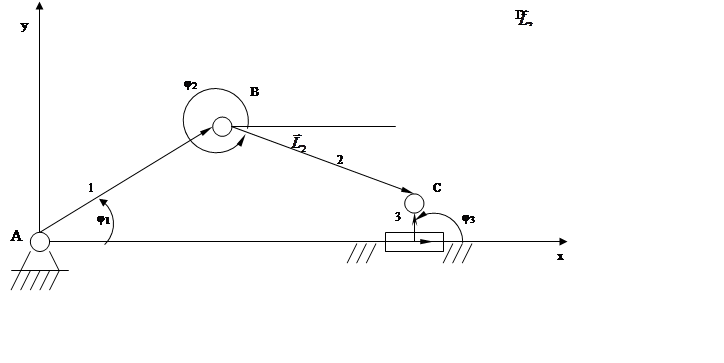
Пример: Кинематический анализ кривошипно-ползунного механизма.
 |
 |
Дано: L1, φ1, L2, L 3, φ3 = П0, φ4 = 0.
Найти: φ2, L4
Записываем уравнение замкнутости контура
![]() (1)
(1)
Вектор положительный, если его направленность совпадает с выбранным направлением обхода.
![]() Вектор отрицательный, если не
совпадает.
Вектор отрицательный, если не
совпадает.
ОХ: ![]()
ОУ: ![]() (2)
(2)
![]()
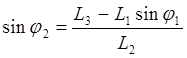
![]()
![]() (3)
(3)
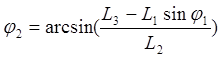 (4)
(4)
4 имеет 2 реальных решения, которые говорят о том, что есть 2 способа сборки исследуемого механизма при одном и том же φ1.
Дальнейшим исследованием выбираем то значение угла 2, которое соответствует исследованию сборки механизма.
Подставив 4 в 3 найдем L4.
![]() (5)
(5)
Для определения скоростей продифференцируем 3.
![]()
![]()
![]() (6)
(6)
Решаем систему 6
относительно ![]() φ'2 и L'4.
φ'2 и L'4.
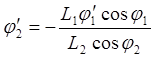 (7)
(7)
![]() (8)
(8)
Дифференцируем систему 6 для определения ускорений:
![]()
![]()
![]() (9)
(9)
Из второго уравнения 9 находим φ''2 , а из первого уравнения - L''4.
Графические методы кинематического исследования механизмов.
Графические методы являются контрольными методами исследования механизмов.
Они состоят в построении планов положений, скоростей и ускорений.
12 (13) – положений
12 (13) – планов скоростей
1 – план ускорений
Алгоритм построения планов положений.
1. Рисуем структурную схему и проводим структурный анализ механизмов.
2. В произвольном месте чертежа рисуем присоединение к стойке начального звена (кривошипа).
3. Рисуем произвольную радиусом (40-60 мм) траекторию движения кривошипа.
4. Определяем крайние (мертвые) точки положения механизма.
5. Изображаем
крайние точки на чертеже.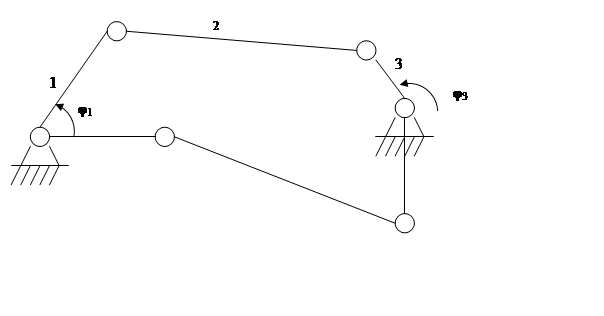
6. Определяем
масштабный коэффициент длин.  (м/мм)
(м/мм)
7. Находим отрезки, которые будут изображать длины звеньев на чертеже, а также координаты всех присоединений к стойке.
8. Наносим на чертеж все остальные присоединения к стойке.
9. Рисуем траектории движений звеньев, присоединенных к стойкам.
10. Начиная от начального звена, методом засечек начинаем строить механизм.
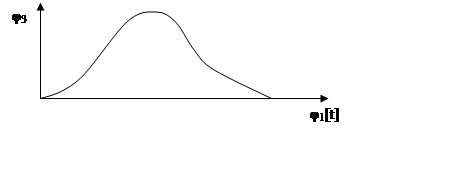
Строим диаграмму движения интересующих нас точек механизма.
Построение планов скоростей.
(рис. 1.а)
1. Провести структурный анализ механизма.
2. Строим его кинематическую схему.
3. Построить планы положений.
4. Построить планы скоростей, для каждого положения механизма. Планы скоростей строятся из точки, которая называется полюсом.
Построим план скоростей для следующего механизма.
*******************************
-
Находим
скорость точки В ![]() и
и ![]()
- Выбираем полюс плана скоростей (РV)
- Из полюса плана скоростей проводим вектор произвольной длины, отображающий скорость точки В
-
Определяем
масштабный коэффициент плана скоростей 
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.