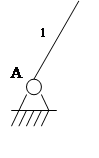
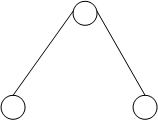
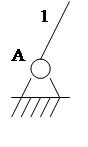
элементарный механизм
(механизм 1-го класса)
+
=
W =
Структурная группа (группа Ассура) – это кинематическая цепь, которая обладает нулевой подвижностью относительно ее внешних кинематических пар и не распадается на более простые цепи, обладающие этими свойствами.
Синтез структурных групп.
1. Синтез структурных групп ведут по структурным формулам машин и механизмов синтезированием структурных групп машин и механизмов существующих в М = 3 и П = 3 производстве.
p1 ![]() 0
0
W = 3n – 2p1 = 0
3n – 2p1 = 0

Найдем соотношение между числом кинематических пар и подвижных звеньев.
|
n |
2 |
4 |
6 |
… |
|
p |
3 |
6 |
9 |
… |
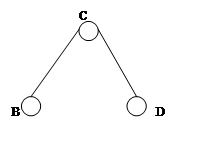
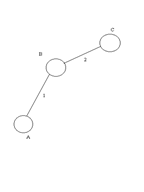
Двухповодковая структурная группа
2.
 Метод развития и
перестановки поводка (+ 2 звена и 3 кинематических пары).
Метод развития и
перестановки поводка (+ 2 звена и 3 кинематических пары).
3. Метод Добровольского – «метод разложения шарнира».
Классификация структурных групп и механизмов.
Все структурные графики в соответствии с Ортоболевским Ассуром, разделяют на классы, порядки и вид.
Двухповодковая группа отнесена ко II – му классу, а элементарный механизм к механизмам I – го класса.
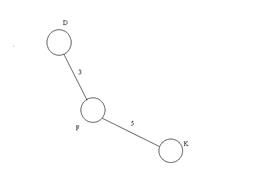
- III класс, 3 - й порядок.
Порядок группы определяется числом внешних кинематических пар, входящих в группу.
Двухповодковая – 2 – ой порядок.
Двухповодковая группа разделяется на виды в зависимости от расположения вращения и поступления пар.
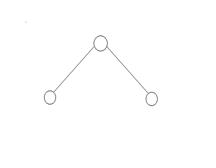
1 вид 2 вид 3 вид 4 вид
5 вид
6 – го вида не существует, так как это клиновый механизм, который существует в другом производстве.
Класс механизма определяется наивысшим классом структурной группы, входящей в него.
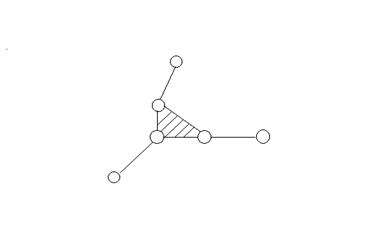
Примеры структурного анализа.
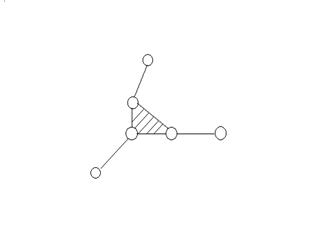
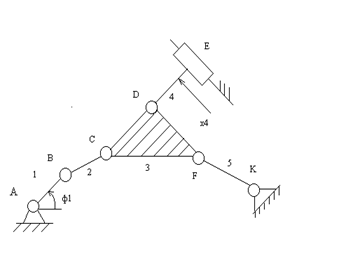 1. Определим подвижность
1. Определим подвижность
W = 3n – 2p1 – p2
P2 = 0![]()
W = 3n – 2p1 = 3·5 - 2·7 = 1
П = 5
p = p1 = 7
Выделим элементарный механизм или механизм 1 – го класса.
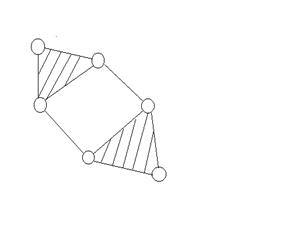
+
I класс структурная группа
III класс,
3 порядок
![]()
механизм III – го класса
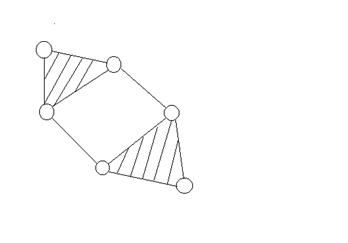
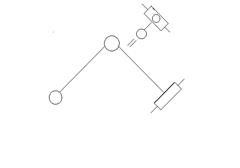
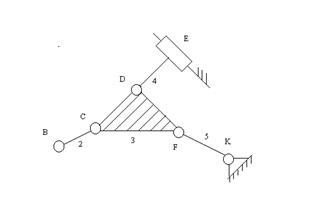
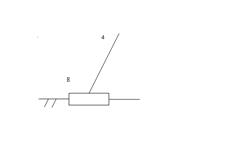
Посмотрим анализ того же механизма, если в качестве начального звена выберем звено 4.
+ +
I класс II класс, 2 порядок, 1 вид II класс, 2 порядок, 1 вид
Класс механизмов зависит от выбора начального звена.
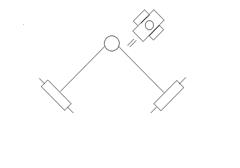
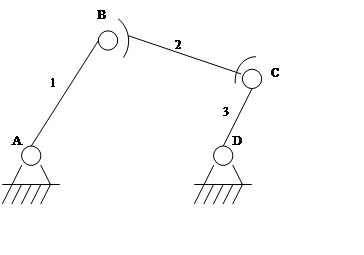
«Механизмы» с избыточными связями.
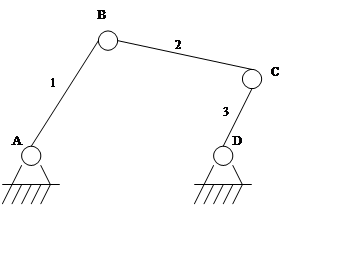
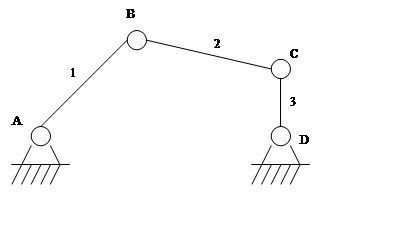
Механизм шарнирного четырехзвенника будет существовать в П=3 пространстве только в том случае, если оси его подвижных пар параллельны. Реальный механизм имеет непараллельные оси и следовательно, он существует в П=6 пространстве.
p = p1 = 4 ![]() W = 6·3
– 5·4 = -2
W = 6·3
– 5·4 = -2
W ![]() 0 – ферма статически
неопределимая,
0 – ферма статически
неопределимая,
W ![]() 0 - механизм,
0 - механизм,
W = 0 – ферма (балка) статически определимая.
Формула показала, что перед нами механизм с избыточными связями.
Для того, чтобы исследуемый шарнирный четырехзвенник превратить в механизм, нужно правильно подобрать кинематические пары.
Сферическая кинематическая пара с пальцем.
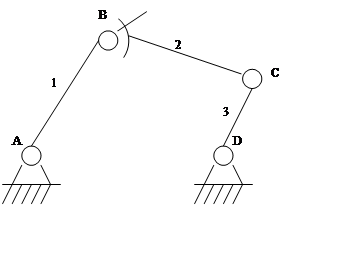
W = 6·3 – 5·3 – 4·1 = -1
Сферическая пара.
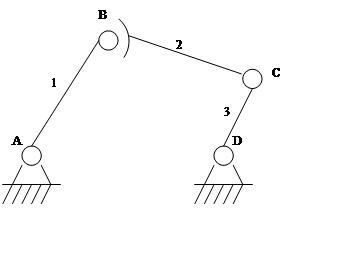
W = 6·3 – 5·3 – 3·1 = 0
W = 6·3 – 5·2 – 3·2 = 2
….
W = 6·3 – 5·2 – 4·1 - 3·1 = 1
Механизм с избыточными связями является неработоспособным и поэтому избыточные связи в механизмах должны выявляться и устраняться путем правильного подбора кинематических пар.
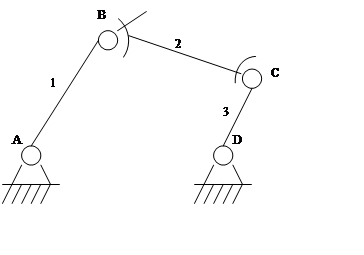
Лишние (или местные) степени подвижности или свободы.
W = 6·3 – 5·2 – 3·2 = 2
Вторая подвижность механизма в данном случае связана с вращением звена 2 вокруг своей оси.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.