где Т – кинетическая энергия механизма
qi – обобщенная i-я координата
q¢i – обобщенная скорость i-ой обобщенной координаты
Qi, - обобщенная сила, имеет размерность [H]
Уравнение движения зубчатого дифференциального механизма:
D W = 3 * n – 2 * p1 – p2 =
K 3 3 * 4 – 2 * 4 – 2
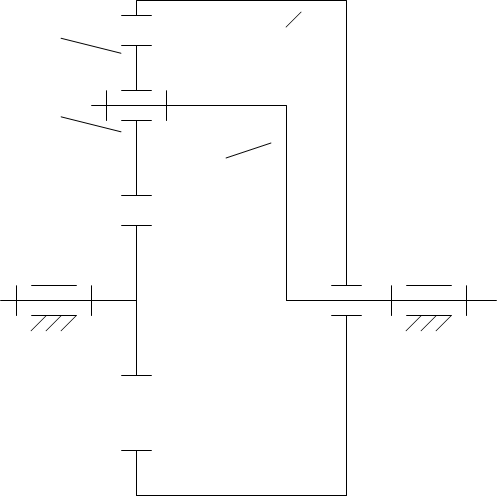
C Пусть в зубчатой
2 дифференциальном ме -
ханизме заданы парамет
H ры:
B
A E F J1, J2, J3 - моменты
инерции всех звеньев,
w1, w2, w3, wH,
m1, m2, m3, mH,
k
геометрические размеры
звеньев,
M1, M2, MH - моменты
Задача состоит в том, чтобы составить дифференциальное уравнение движения механизма.
Так как механизм является дифференциальным, то для него запишем уравнение Лагранжа:
![]() d / dt (¶T / ¶w1) - ¶T / ¶j1 = Mп1
d / dt (¶T / ¶w1) - ¶T / ¶j1 = Mп1
(1)
d / dt (¶T / ¶wH)- ¶T / ¶jH = MпH
Уравнение записано для 1-ой обобщенной координаты
Запишем для кинетической энергии зубчатого дифференциального механизма:
T = J1 * w12 / 2 +k * J2 * w22 / 2+ k * m2 * V22 / 2 + J3 * w32 / 2 + JH * wH 2 / 2 (2)
Линейная скорость 2-го звена через wH:
V2 =w H * r H (3)
Подставим (3) в (2):
T = J1 * w12 / 2 + k * J2 * w22 / 2+ k * m2 *w2 H * r2 H / 2 + J3 * w32 / 2 + JH * wH 2 / 2 (4)
Выразим угловую скорость 2-го и 3-го звена через угловые скорости 1-го звена и водила:
w2 = uH21 * w1 + u12H * wH (5)
w3 = uH31 * w1 + u13H * wH (6)
Подставим (5) и (6) в (4):
2 * T = J1 * w12 + k * J2 * (uH21 * w1 + u12H * wH) 2+ k * m2 *w2 H * r2 H +
+ J3 * ( uH31 * w1 + u13H * wH)2 + JH * wH 2 (7)
Раскроем скобки:
2 * T = J1 * w21 + k * J2 * (uH21) 2* w21 + 2 * k * J2 * uH21 * u12H * w 1 * wH +
2 * k * J2 * ( u12H) 2 * w2H + k * m2 *w2 H * r2 H + J3 * ( uH31 ) 2 * w21+ JH * wH 2 +
+ J3 * ( u13H ) 2 * w2H + 2 * J3 * uH31 * u13H * w 3 * wH (8)
Введем следующие обозначения:
J 11 = J1+ k * J2 * ( u H21 ) 2 + J3 * (uH31 ) 2 - инерционный коэффициент 1-го звена (9)
J 1H = k * J2 * u H21* u 12H + J3 * uH31 * u13H - инерционный коэффициент H-го звена (10)
J HH = JH+ k * JH * ( u 12H ) 2 + J3 * (u13H ) 2 + k * m2 * r2 H
Подставим (9),(10),(11) в (8):
T = 1 / 2 [ J11 * w21 + 2 * J1H * w1 * wH + JHH * wH 2 ] (12)
В соответствии с (1) найдем частные производные кинетической энергии:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.