 mn - приведенная масса,
mn - приведенная масса,
Fn - приведенная сила.
Fn mn
Уравнение движения механической системы имеет вид:
n n n
S Ak = S Ti- S Toi (1)
k=1 i=1 i=1
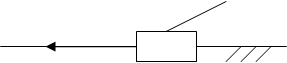
Динамическая модель механизма имеет вид:
Jn
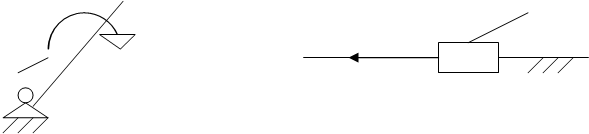 Mn
Mn
1 Fn mn
A
Запишем уравнение (1) для исследуемых динамических моделей: j
ò Мn* dj = Jn* w12 / 2- Jno* w102 / 2 (2)
jо
x
ò Fn* dx1 = mn* V12 / 2 - mno* V102 / 2
xо
Уравнение (1) будет соответствовать уравнению (2) только в том случае, если выполняется следующее условие:
j x
S Ak = ò Мn* dj (3) S Ak = ò Fn* dx 1
jо xо
Если S Ti = Jn* w12 / 2 (4) S Ti = mn* V12 / 2
S Tio =Jno* w102 / 2 (5) STio = mno* V102 / 2
Если будут соблюдены условия (3) и (4), то условия (5) будут соблюдены тождественно.
Найдем момент (силу), для чего продифференцируем уравнение (3):
S dAk = Мn* dj1 (7) S Ak = Fn* dx 1
Разделим левые и правые части (7) на dt:
S dAk / dt = Мn* dj1 / dt S Ak /dt = Fn* dx 1 / dt
S Pk = Мn* w1 (8) S Pk = Fn* V1
Из теоретической механики известно, что мощность k – ой силы можно определить:
![]() Pk = Fк * Vк * cos (Fк , Vк) + Мk * wk (9)
Pk = Fк * Vк * cos (Fк , Vк) + Мk * wk (9)
Подставим (9) в (8):
S[ Fк * Vк * cos (Fк , Vк) + Мk * wk] = Мn* w1
![]()
![]() (10)
(10)
S[ Fк * Vк * cos (Fк , Vк) + Мk * wk] = Fn* V1
Решим (10) относительно искомых величин:
![]()
![]()
Мn = S[ Fк * Vк * cos (Fк , Vк) / w1 + Мk * wk /w1]
![]()
![]() (11)
(11)
Fn = S[ Fк * Vк *cos (Fк , Vк) / V1 + Мk * wk / V1 ]
Vк = dx k / dt
![]() dx k /
dj1 = X¢kj
dx k /
dj1 = X¢kj
w1 = dj1 / dt
![]()
![]()
![]()
![]()
![]() m
m
Мn =S [ Fк * X¢kj * cos (Fк , Vк) + Мk *j¢kj]
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.