Министерство Образования и Науки Российской Федерации
Федеральное агентство по образованию
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматики
Лабораторная работа №2
система с градиентным алгоритмом адаптации
Вариант №5
Студент: Чупров М.Е.
Дата выполнения: ………………………
Отметка о защите: ………………………
1. Цель работы
Изучение свойств непрерывной адаптивной системы, синтезированной на основе второго метода Ляпунова; исследование влияния параметров возмущения на качество работы системы.
2. Исходные данные
Таблица 1
|
Коэффициенты ОУ |
Перерегулирование, σ% |
Время переходного процесса, tп |
||
|
a0 |
a1 |
b |
||
|
0.1 |
0.5 |
0.1 |
30 |
10 |
3. Ход работы
3.1 Расчет параметров адаптивного регулятора и наблюдателя
Определение элементов матриц ![]() ,
,
![]() ,
, ![]() по
заданным требованиям к качеству процессов (таблица 1):
по
заданным требованиям к качеству процессов (таблица 1):

![]()
![]()

![]() .
.
Расчет наблюдателя:
![]() ;
;
![]() ;
;
![]() ;
;
 .
.
Уравнение системы с наблюдателем и вычисленными параметрами:
Матрица Н удовлетворяет уравнению Ляпунова:
![]()
 .
.
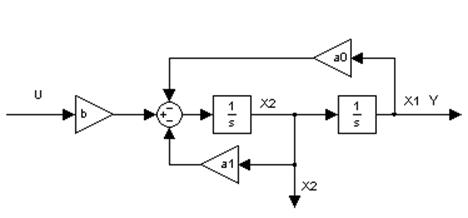
3.4. Собрать схему эталонной модели на интегрирующих
элементах. Снять переходную характеристику ![]() .
Определить показатели качества: σ%, tn.
.
Определить показатели качества: σ%, tn.
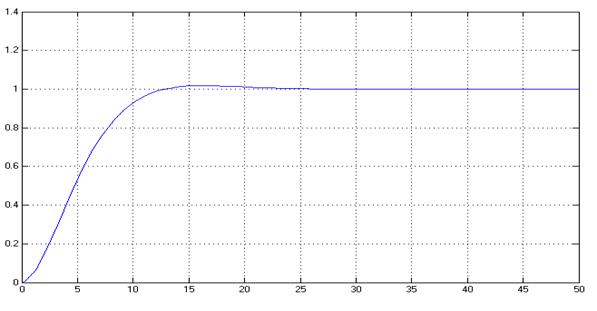
Стационарный объект управления:
у
 t
t
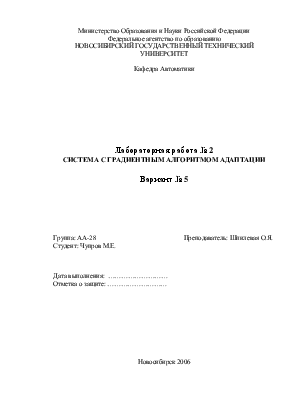
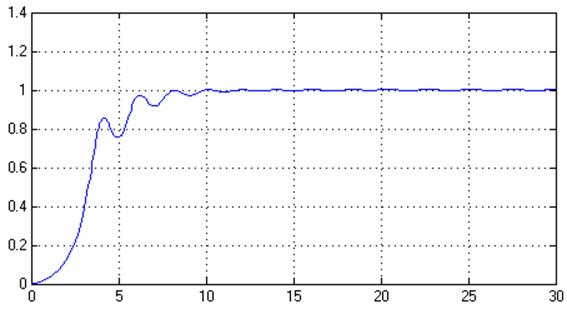
Рис. 1. Переходный процесс y(t). Стационарный объект (% = 1%, tпп = 10,5 с)
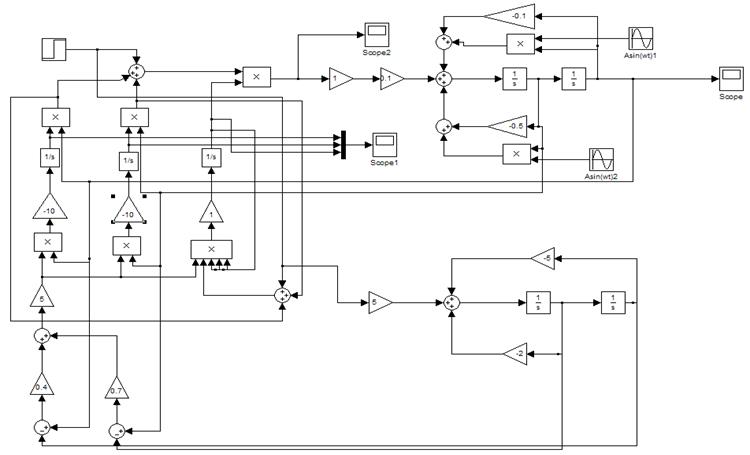
3.5. Собрать схему адаптивной системы, объект управления моделировать по схеме,
приведенной на рисунке 1. Снять переходную характеристику системы (y(t)) и процессы на выходе адаптера (![]() ) при r(t)=1(t), нулевых начальных условиях,
) при r(t)=1(t), нулевых начальных условиях, ![]() =10,
=10, ![]() =1,kr(0)=1.
Определить показатели качества (s%,
=1,kr(0)=1.
Определить показатели качества (s%, ![]() ,
,
![]() ).
).
Схема адаптивной системы
у
 t
t
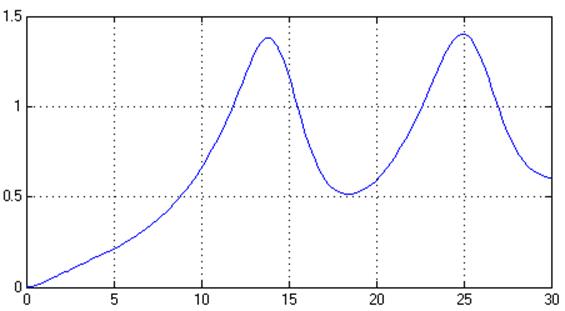
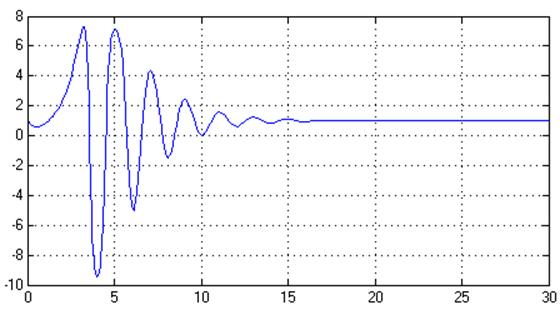
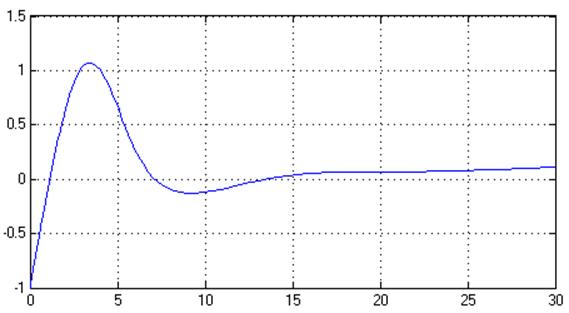
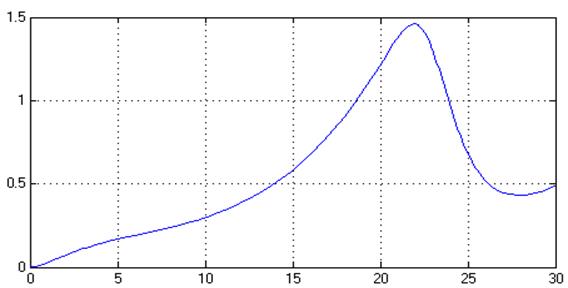
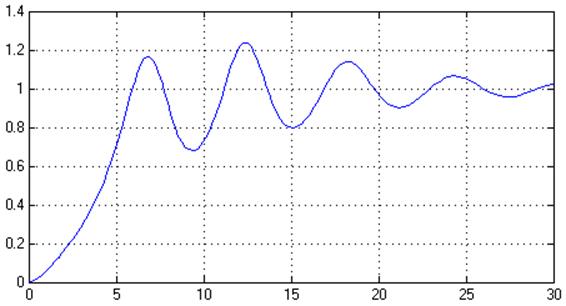
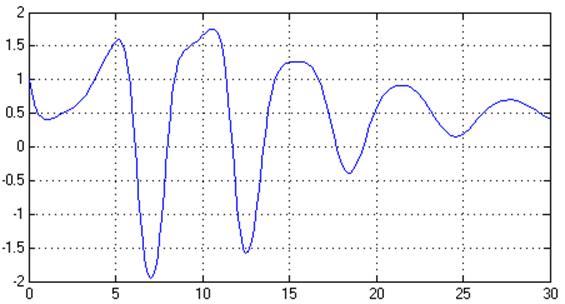
Рис. 2. Переходный процесс в адаптивной системе, y(t), показатели качества являются не удовлетворительными.
U
 t
t
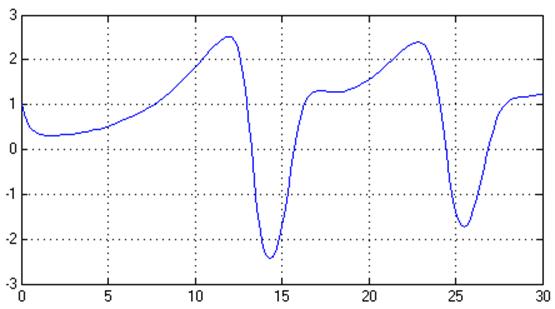
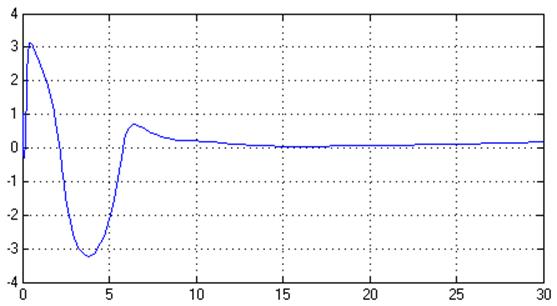
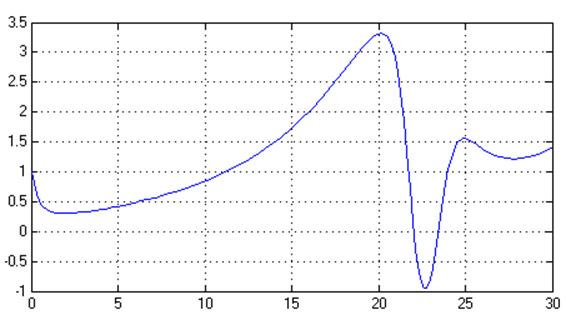
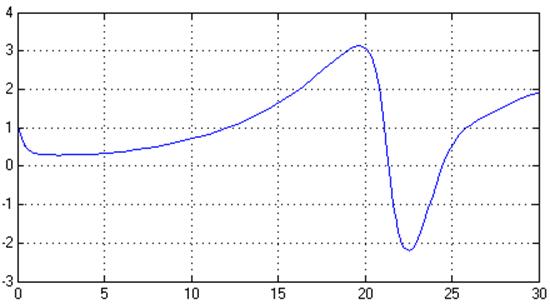
Рис. 3. Управляющее воздействие, U(t)
![]()
 t
t
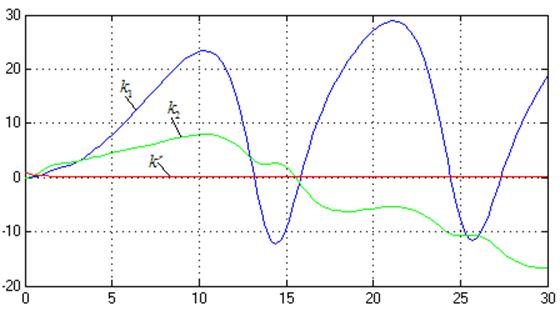
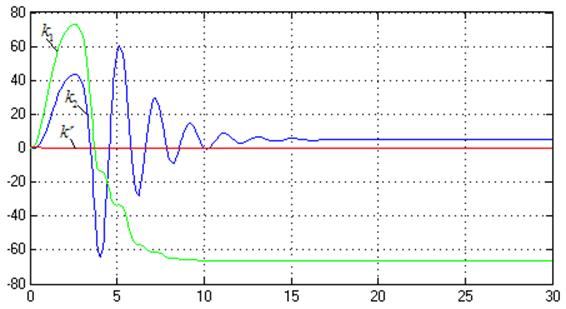
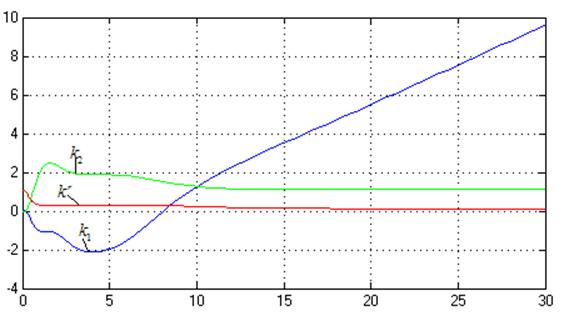
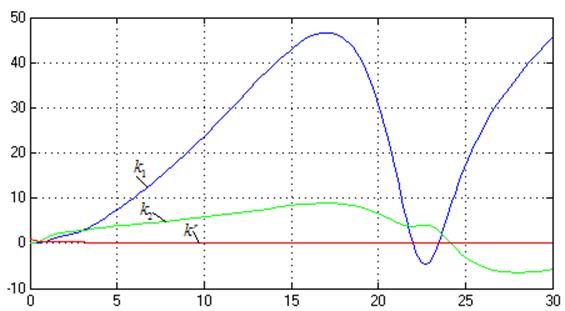
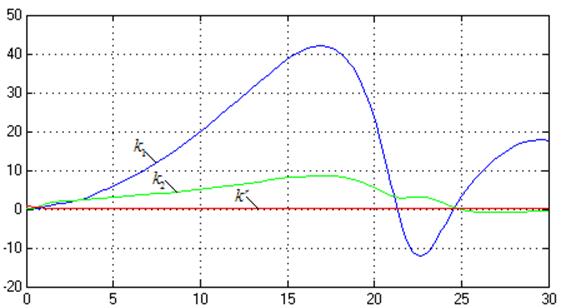
Рис. 4. Переходные
процессы ![]()
3.6.
Изменить значения коэффициентов передачи адаптера так чтобы показатели качества
выходного процесса соответствовали эталонным значениям, полученным в п. 3.4.
Сравнить переходные характеристики и процессы в адаптере с результатами п.3.5
по s%, ![]() ,
, ![]() .
.
γ = 200, 200, 1
y
 t
t
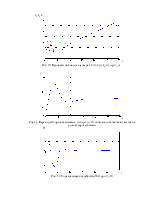
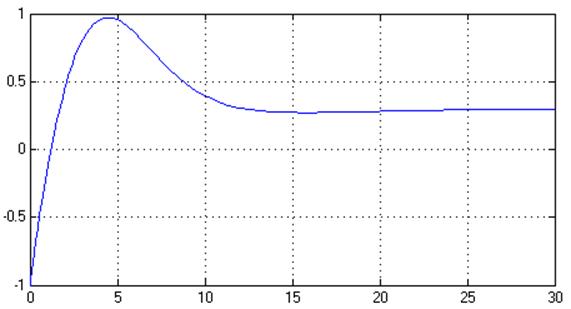
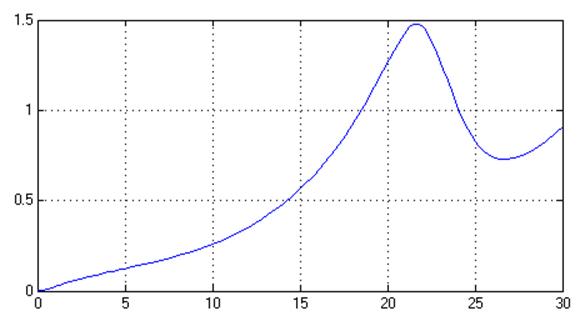
Рис. 5. Переходный процесс в адаптивной системе (% = 1%, tпп = 7,7 с)
U
 t
t
Рис. 6. Управляющее воздействие, U(t)
![]()
 t
t
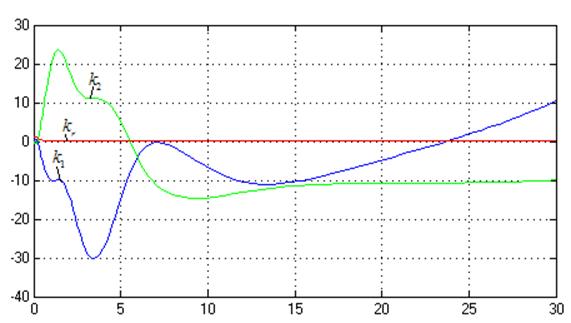
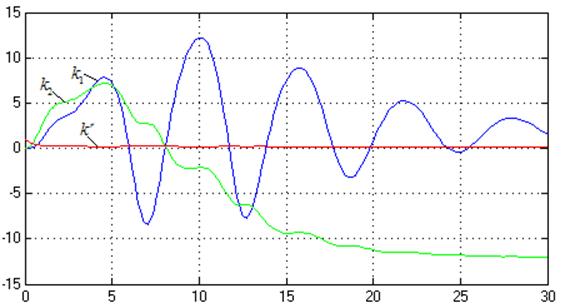
Рис. 7. Переходные
процессы ![]() (t1ппа=22
с, t2ппа=14 с, trппа=4,7
с)
(t1ппа=22
с, t2ппа=14 с, trппа=4,7
с)
3.7.
Изменить начальные условия в объекте (![]()
![]() (0)=1), получить вид y(t),
(0)=1), получить вид y(t), ![]() (t),
(t), ![]() (t),
(t),![]() (t).
Моделирование провести при g2=1 и
различных g1 : g1=1,
g1=10. Сравнить результат с п. 3.5.
(t).
Моделирование провести при g2=1 и
различных g1 : g1=1,
g1=10. Сравнить результат с п. 3.5.
y
 t
t
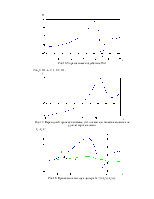
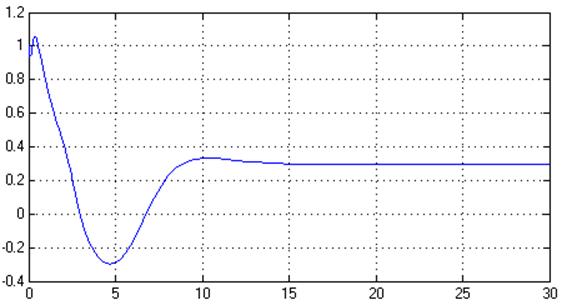
Рис.8. Переходный процесс системы, y(t) при γ1=1, показатели качества являются не удовлетворительными.
U
 t
t
Рис. 9. Управляющее воздействие, U(t) при γ1=1
![]()
 t
t
Рис. 10. Процессы на
выходе адаптера (![]() ,
,![]() ) при γ1=1 .
) при γ1=1 .
y
 t
t
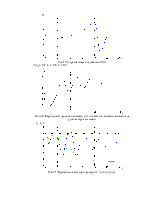
Рис.11. Переходный процесс системы, y(t) при γ1=10, показатели качества являются не удовлетворительными.
U
 t
t
Рис. 12. Управляющее воздействие, U(t) при γ1=10
![]()
 t
t
Рис. 13. Процессы на
выходе адаптера (![]() ,
,![]() ) при γ1=10 .
) при γ1=10 .
3.8.
Изменить последовательно параметры объекта
![]() ,
, ![]() , b в
2 раза, выполнить задание п. 3.5.
, b в
2 раза, выполнить задание п. 3.5.
1) a0 = 0,2, a1 = 0,5, b = 0,1.
y
 t
t
Рис. 14. Переходный процесс в системе, y(t), показатели качества являются не удовлетворительными.
![]()
 t
t
Рис.15. Процессы на выходе адаптера (![]() ,
,![]() ).
).
U
 t
t
Рис.16. Управляющее воздействие, U(t)
2) a0 = 0,1, a1 = 1, b = 0,1.
y
 t
t
Рис. 17. Переходный процесс в системе, y(t), показатели качества являются не удовлетворительными.
![]()
 t
t
Рис.18. Процессы на
выходе адаптера (![]() ,
,![]() ).
).
U
 t
t
Рис.19. Управляющее воздействие, U(t)
3) a0 = 0,1, a1 = 0,5, b = 0,2.
y
 t
t
Рис. 20. Переходный процесс в системе, y(t), показатели качества являются не удовлетворительными.
![]()
 t
t
Рис.21. Процессы на
выходе адаптера (![]() ,
,![]() ).
).
U
 t
t
Рис.22. Управляющее воздействие, U(t)
3.9.
Изменить модель объекта управления ![]() ,
, ![]() . Провести моделирование при нулевых
начальных условиях и различных значениях Ã,
. Провести моделирование при нулевых
начальных условиях и различных значениях Ã, ![]() : а)
: а) ![]() =1,
=1, ![]() =1, б)
=1, б)
![]() =1,
=1, ![]() =10,
в)
=10,
в) ![]() =10,
=10, ![]() =1.
=1.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.