Второй способ
заключается в получении программных движений рабочих органов за счет
соответствующего выбора законов изменения входных параметров двигателей ![]() , совокупность которых образует программное
управление. При этом для передачи движения от двигателей рабочим органам могут
быть использованы механизмы как с линейными, так и с нелинейными функциями
положения. Программное управление в последнее время все более широко
используется в технологических и транспортных машинах. Часто оно осуществляется
рабочим-оператором; таким способом управляются автомобили, самолеты, подъемные
краны. Вместе с тем все более широкое распространение получают автоматы с
программным управлением, в особенности промышленные роботы.
, совокупность которых образует программное
управление. При этом для передачи движения от двигателей рабочим органам могут
быть использованы механизмы как с линейными, так и с нелинейными функциями
положения. Программное управление в последнее время все более широко
используется в технологических и транспортных машинах. Часто оно осуществляется
рабочим-оператором; таким способом управляются автомобили, самолеты, подъемные
краны. Вместе с тем все более широкое распространение получают автоматы с
программным управлением, в особенности промышленные роботы.
Программное управление оказывается особенно полезным в тех случаях, когда рабочие органы машины, в зависимости от тех или иных условий, должны осуществлять различные программные движения (например, перемещать груз по различным траекториям). Переход от одного программного движения к другому сводится при этом к изменению программного управления, что в современных системах управления, использующих электронные устройства, осуществляется достаточно просто. При применении первого способа изменение программных движений связано с изменением структуры или параметров программирующего механизма, что требует, по крайней мере, переналадки механизма или замены его отдельных звеньев.
 Это
преимущество обуславливает широкое применение принципа программного управления
в машинах, используемых для гибких автоматизированных производств, в которых
необходима быстрая переналадка системы на новый рабочий процесс.
Это
преимущество обуславливает широкое применение принципа программного управления
в машинах, используемых для гибких автоматизированных производств, в которых
необходима быстрая переналадка системы на новый рабочий процесс.
Вместе с тем машинам
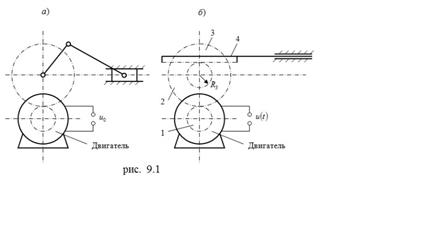
с программным управлением присущи и некоторые недостатки. На рис. 9.1 приведены
схемы машинных агрегатов, в которых рабочие органы совершают
возвратно-поступательное движение. В схеме, показанной на рис. 9.1, а,
ротор двигателя вращается с постоянной угловой скоростью; преобразование этого
вращения в возвратно-поступательное движение рабочего органа (ползуна)
осуществляется программирующим кривошипно-ползунным механизмом. В схеме,
приведенной на рис. 9.1, б, на вход двигателя постоянного тока с
независимым возбуждением подается знакопеременное входное напряжение ![]() , вызывающее реверсивное движение ротора,
которое с помощью зубчатой передачи и зубчато-реечного механизма преобразуется
в возвратно-поступательное движение выходного звена – зубчатой рейки; таким
образом, в этой схеме используется принцип программного управления.
, вызывающее реверсивное движение ротора,
которое с помощью зубчатой передачи и зубчато-реечного механизма преобразуется
в возвратно-поступательное движение выходного звена – зубчатой рейки; таким
образом, в этой схеме используется принцип программного управления.
Сравнивая эти схемы, легко заметить преимущество системы с программным управлением в том случае, если, например, необходимо изменить величину хода рабочего органа. В первой схеме этот ход равен удвоенной длине кривошипа, и для его изменения необходимо изменение этой длины, что требует переналадки механизма. Рассмотрим, каким образом изменение хода достигается во второй схеме. Предположим, что для двигателя может быть выбрана идеальная характеристика (8.5), а входное напряжение изменяется по гармоническому закону
![]() , (9.1)
, (9.1)
Подставляя (9.1) в (8.5), получаем
![]() . (8.5)
. (8.5)
![]() .
.
Интегрируя это
выражение и полагая, что при ![]()
![]() ,
находим
,
находим
![]() . (9.2)
. (9.2)
Отсюда легко определить закон движения выходного звена:
![]() , (9.3)
, (9.3)
где ![]() – передаточное отношение зубчатой
передачи, а
– передаточное отношение зубчатой
передачи, а ![]() – радиус начальной окружности зубчатого
колеса 3. Из выражения (9.3) видно, что ход рейки
– радиус начальной окружности зубчатого
колеса 3. Из выражения (9.3) видно, что ход рейки
![]() , (9.4)
, (9.4)
и для его изменения достаточно изменить напряжение ![]() .
.
С другой стороны,
легко заметить, что отклонение хода от его номинальной величины в первой схеме
зависит только от точности выполнения длины кривошипа и не зависит от
каких-либо других параметров системы. Во второй схеме величина хода зависит от
многих параметров, как механических (![]() ,
,![]() ),
так и связанных с характеристикой двигателя
(
),
так и связанных с характеристикой двигателя
(![]() ); поэтому обеспечение точности перемещения
выходного звена оказывается в этом случае более сложным.
); поэтому обеспечение точности перемещения
выходного звена оказывается в этом случае более сложным.
Сравнивая обе системы, замечаем также, что в первом случае реверсивное движение совершает только рабочий орган машины, а во втором – все звенья механической системы, включая ротор двигателя. Естественно, что динамические нагрузки, зависящие в первую очередь от инерционных сил, окажутся в системе с программным управлением более значительными. Это свидетельствует о большем значении динамических факторов и, следовательно, о возрастании роли динамического анализа при проектировании машин с программным управлением.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.